Catégories: Électriciens débutants, Moteurs électriques et leur application
Nombre de fois vus: 8782
Commentaires sur l'article: 0
Classification des moteurs
Selon la finalité, les modes et conditions de fonctionnement attendus, le type d'alimentation, etc., tous les moteurs électriques peuvent être classés selon plusieurs paramètres: par le principe d'obtention du moment de fonctionnement, par le mode de fonctionnement, par la nature du courant d'alimentation, par la méthode de contrôle de phase, par type d'excitation, etc. Examinons plus en détail la classification des moteurs électriques.

Occurrence de couple
Le couple dans les moteurs électriques peut être obtenu de deux manières: par le principe de l'hystérésis magnétique ou purement magnétoélectrique. Moteur d'hystérésis reçoit un couple à travers l'hystérésis pendant l'inversion de l'aimantation d'un rotor magnétiquement solide, tandis que moteur magnétoélectrique le couple est le résultat de l'interaction des pôles magnétiques explicites du rotor et du stator.

Aujourd'hui, les moteurs magnétoélectriques constituent à juste titre la part du lion de l'abondance totale des moteurs électriques utilisés dans de nombreux domaines. Ils sont divisés par la nature du courant d'alimentation en:
-
Moteurs à courant continu
-
Moteurs AC
-
moteurs universels.
Contrairement à un moteur magnétoélectrique, la magnétisation du rotor par rapport à ses axes géométriques est autorisée dans le moteur à hystérésis, et cette caractéristique particulière ne permet pas d'étendre les lois générales de la conversion magnétoélectrique au mode de fonctionnement synchrone du moteur à hystérésis.
Regarder - Dispositif et principe d'action du moteur électrique le plus simple et Comment fabriquer un simple moteur électrique en 10 minutes

Classification des moteurs
Moteurs à courant continu

Dans un moteur alimenté en courant continu, le moteur lui-même est responsable de la commutation des phases. Cela signifie que bien qu'un courant continu soit fourni à la machine électrique, néanmoins, en raison de l'action des mécanismes internes de l'appareil, le champ magnétique s'avère être capable de maintenir le couple du rotor (comme si un courant alternatif agissait dans l'enroulement du stator).

Le dispositif et le fonctionnement du moteur à courant continu: 1 - ancre, 2 - arbre, 3 - plaques collectrices, 4 - ensemble de balais, 5 - circuit magnétique d'induit, 6 - circuit magnétique d'inducteur, 7 - enroulements de champ, 8 - corps d'inducteur, 9 - couvercles latéraux 10 - ventilateur, 11 pieds, 12 roulements.
Un moteur à courant continu se compose d'une partie fixe appelée inductance et d'une partie mobile appelée ancre. Selon la conception, des aimants permanents peuvent être situés sur l'inductance de l'inductance, ce qui simplifie la conception, mais ne vous permet pas d'ajuster le flux magnétique du moteur, ce qui affecte sa vitesse.
Par la méthode de création d'un champ magnétique en mouvement, les moteurs à courant continu sont divisés en:
-
valve (sans balais)
-
collectionneur.
Les moteurs sans balais ont des onduleurs électroniques dans leur conception, qui effectuent une commutation de phase. Les moteurs collecteurs sont traditionnellement équipés unités de collecteur de brosse, qui sont conçus pour synchroniser purement mécaniquement la puissance des enroulements du moteur avec la rotation de ses pièces mobiles.
Excitation des moteurs collecteurs

Selon la méthode d'excitation, les moteurs collecteurs sont des types suivants: à excitation indépendante d'aimants permanents ou d'électro-aimants, ou à auto-excitation. Les moteurs d'excitation à aimants permanents contiennent des aimants sur le rotor.Les moteurs auto-excités ont un enroulement d'ancrage spécial sur le rotor, qui peut être connecté en parallèle, en série ou mélangé avec un enroulement d'excitation spécial.
Moteur d'entraînement
Un moteur à courant pulsé est similaire à un moteur à courant continu. La différence réside dans la présence d'inserts doublés sur le noyau, ainsi que de poteaux doublés supplémentaires. De plus, le moteur à courant d'ondulation a un enroulement de compensation. Ces moteurs sont utilisés dans les locomotives électriques, où ils sont généralement propulsés courant alternatif redressé.
Moteur AC
Les moteurs à courant alternatif, comme leur nom l'indique, sont alimentés en courant alternatif. Ils sont synchrones et asynchrones.
Pour les moteurs à courant alternatif synchrones, le champ magnétique du stator se déplace à la même vitesse angulaire que le rotor, tandis que les moteurs asynchrones ont toujours un certain retard (caractérisé par la valeur de glissement s) - le champ magnétique du stator dans son mouvement semble être en avance sur le rotor, qui à son tour est toujours cherche à le rattraper.
Les moteurs synchrones de haute puissance (d'une capacité de centaines de kilowatts) ont des enroulements de champ sur le rotor. Les rotors des moteurs synchrones moins puissants sont équipés d'aimants permanents, qui forment les pôles. Les moteurs à hystérésis sont également, en principe, synchrones.
Moteurs pas à pas - Il s'agit d'une catégorie spéciale de moteurs synchrones avec un contrôle de haute précision de la vitesse de rotation, jusqu'à un comptage de pas discret.
Les moteurs à réaction synchrones à soupapes sont alimentés par un onduleur.Voir ce sujet:Moteurs à réaction synchrones modernes

Les moteurs asynchrones à courant alternatif se distinguent par le fait que leur vitesse angulaire de rotation du rotor est toujours inférieure à la vitesse angulaire de rotation du champ magnétique du stator. Les moteurs à induction sont monophasé (avec enroulement de démarrage), biphasé (un moteur à condensateur s'applique également à eux), triphasé et multiphasé.
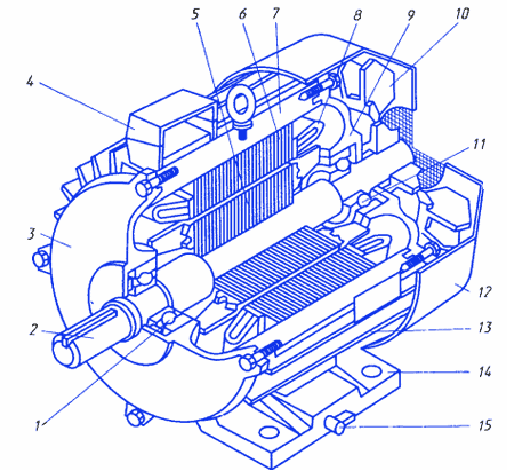
Conception de moteur à induction triphasé à cage d'écureuil
Un moteur électrique asynchrone se compose à la fois d'une partie fixe (stator) et d'une partie mobile (rotor), qui sont maintenues par des roulements 1 et 11 installés dans les couvercles latéraux 3 et 9. Le rotor se compose d'un arbre 2, sur lequel est fixé un circuit magnétique 5 avec un enroulement. Le stator du moteur est constitué d'un boîtier 7, auquel est fixé un circuit magnétique 6. Un enroulement triphasé est disposé dans les rainures du circuit magnétique 8. Le couvercle de la boîte à bornes 4 et le couvercle de protection de la roue 12 sont également fixés au boîtier.
Le rotor de phase a un enroulement triphasé, fabriqué par le type d'enroulement du stator. Certaines extrémités des bobines sont connectées au point zéro ("étoile"), tandis que d'autres sont connectées aux bagues collectrices. Des brosses sont imposées sur les anneaux, établissant un contact glissant avec l'enroulement du rotor. Avec cette conception, il est possible de connecter un rhéostat de démarrage ou de réglage à l'enroulement du rotor, ce qui permet de modifier la résistance électrique dans le circuit du rotor.
Voir aussi - Différences entre les moteurs à induction et les moteurs à courant continu, Différences entre les moteurs à induction à cage d'écureuil et à verrouillage de phase
Moteur asynchrone avec convertisseur de fréquence pour un contrôle en douceur de la vitesse de rotation de l'arbre en raison des changements de fréquence et de tension d'alimentation:

Moteurs à balais universels
Le moteur collecteur universel peut fonctionner au moins en courant continu, même en courant alternatif (50 Hz). A une excitation en série, est utilisé dans les appareils électroménagersoù une vitesse de rotation supérieure au maximum pour les moteurs à courant alternatif conventionnels de 3000 tr / min est requise. En règle générale, la puissance de ces moteurs ne dépasse pas 200 watts. Rencontre contrôle thyristor régime moteur universel.
Une version améliorée du moteur universel est un moteur synchrone avec un capteur de position du rotor, où le rôle du collecteur est joué par un inverseur électronique.
Autres articles utiles sur ce sujet:
Types de moteurs électriques et principes de leur fonctionnement
Caractéristiques des moteurs asynchrones
Comment déterminer la vitesse de rotation d'un moteur électrique
Comment vérifier le moteur électrique
Comment démonter un moteur à induction
Types et disposition des révolutions des moteurs collecteurs
Voir aussi sur e.imadeself.com
: