Kategorie: Początkujący elektrycy, Sterowniki programowalne
Liczba wyświetleń: 8010
Komentarze do artykułu: 4
Przykład modernizacji obwodu elektrycznego windy towarowej za pomocą sterownika programowalnego (PLC)
Ostatnio temat automatyzacji różnych procesów technologicznych z wykorzystaniem sterowników programowalnych (PLC) zyskuje na popularności. Mimo to w Internecie jest bardzo niewiele praktycznych artykułów z prawdziwymi przykładami programowania sterowników PLC. Ten temat jest bardzo interesujący, ponieważ jest na styku sprzętu elektrycznego, elektroniki i programowania. Nauka pisania programów PLC jest możliwa nawet bez ich posiadania. Tryb emulacji, który jest dostępny we wszystkich nowoczesnych pakietach oprogramowania, bardzo w tym pomaga.
W tym artykule pokażę przykład konwersji obwodu elektrycznego zbudowanego na urządzeniach przekaźnikowych (rozruszniki, przekaźniki) na program, który będzie działał na kontrolerze. Muszę od razu powiedzieć, że to tylko niewielki projekt edukacyjny i nie udaje, że wyjaśnia coś więcej niż tylko wyjaśnienie podstawowych zasad programowania PLC konkretnym przykładem.
Przekaźnik ładunków
Wstępny schemat tego projektu to stosunkowo prosty schemat windy towarowej (windy towarowej) z kontrolą dźwigni na dwóch piętrach. Schemat pokazano na poniższym rysunku.

Elektryczny wciągnik komunalny z jednym silnikiem na dwóch przystankach
W obwodzie jest tylko jeden silnik, który podnosi i obniża windę między dwoma piętrami. Jest to odwracalny trójfazowy silnik asynchroniczny z wirnikiem fazowym 380 V. Rezystory rozruchowe i styki trzech rozruszników elektromagnetycznych są podłączone do wirnika silnika, umożliwiając uruchomienie silnika w 3 etapach. To rozwiązanie pozwala w procesie uruchamiania silnika zmniejszyć prąd rozruchowy i zwiększyć moment rozruchowy.
Uruchomienie silnika odbywa się automatycznie za pomocą trzech przekaźników przyspieszenia (1RU - 3RU). Są to konwencjonalne 24-woltowe zegary prądu stałego. Do ich mocy jest transformator obniżający i prostownik.
Trójfazowy blokowy hamulec elektromagnetyczny jest podłączony do zacisków silnika, który po przyłożeniu napięcia do silnika hamuje jego wał, a gdy napięcie zanika, wał silnika jest natychmiast zaciskany i ustalany w ustalonym położeniu.
Silnik wsteczny z wykorzystaniem styków dwóch starterów elektromagnetycznych (na schemacie B i H). Zasilanie obwodu jest dostarczane przez wyłącznik automatyczny (na obwodzie - WU) i wyłącznik automatyczny (1A).
Włączenie do pracy windy jest możliwe tylko przy napięciu. Jest kontrolowany przez przekaźnik napięciowy (PH), który znajduje się po lewej stronie obwodu. Istnieją również gniazda i dzwonek, który można włączyć z dowolnego miejsca, aby zadzwonić do dyrygenta.
Drzwi wału i kabiny otwierają się i zamykają ręcznie. Sterowanie windą odbywa się za pomocą przełącznika dźwigniowego w trzech pozycjach - „góra”, „dół” i „zero”.
Gdy uchwyt zostanie przesunięty do jednej z ekstremalnych pozycji, winda zaczyna się poruszać, a gdy osiągnięta zostanie pożądana podłoga, uchwyt zostanie mechanicznie przesunięty do pozycji „zero”. W takim przypadku styki w obwodzie przełącznika są zerwane, cewka rozrusznika jest pozbawiona napięcia, silnik jest odłączony od sieci, styki w obwodzie wirnika są otwarte, a winda zatrzymuje się. Następnie możesz rozpocząć ruch windy w przeciwnym kierunku.

Winda towarowa należy do urządzeń wysokiego ryzyka, aw jej obwodzie (podobnie jak w schematach dowolnych wind) istnieje wiele różnych blokad styki wyłącznika krańcowego oraz kontakty różnych urządzeń ochronnych.
W tym schemacie są to wyłączniki krańcowe (końcowe), które kontrolują zamykanie drzwi kabiny, wałki na dolnych i górnych piętrach, podnoszenie i opuszczanie kabiny nad roboczą górną i dolną strefą, styki „luzu lin podnoszących”, które otwierają się, gdy linka pęka lub poluzowuje się, na którą waży. kabina windy, styki ogranicznika prędkości, łapacza i napinacza linki. Łącznie - 14 dyskretnych czujników.
Gdy którykolwiek z wymienionych styków się otworzy, silnik windy musi natychmiast wyłączyć się i zahamować, dlatego wszystkie czujniki, styk przekaźnika napięcia i przycisk „General stop” są połączone szeregowo z obwodem cewki siłowników elektromagnetycznych sterujących silnikiem.
Tworzenie programu PLC dla windy towarowej
Zadanie polegało na tym, że bez zmiany czegokolwiek w urządzeniu, w zasadzie działanie i sterowanie windą, przenieśli swój obwód z przestarzałego widoku przekaźnika do opcji za pomocą programowalnego kontrolera.
Zaletą formy programu do sterowania instalacją jest to, że w przyszłości, w razie potrzeby, program można łatwo zmodyfikować, poprawić wygodę sterowania windą, zmienić logikę jego działania i poprawić jego funkcjonalność. Działaniom tym musi jednak towarzyszyć zmiana konstrukcji windy i dodanie innych dodatkowych urządzeń do obwodu. W naszej wersji takie zadanie nie było postawione.
W tym przypadku zaproponowano opcję modernizacji wyposażenia elektrycznego windy towarowej poprzez zmianę jej schematu sterowania z takim podejściem, że na przykład absolutnie nic by się nie zmieniło dla osoby obsługującej taki mechanizm.
Dlatego uratujemy główne urządzenie sterujące windą - przełącznik dźwigniowy i pozostawimy silnik asynchroniczny z wirnikiem fazowym z jego trzystopniowym uruchomieniem, chociaż nadal chcemy go zastąpić silnikiem asynchronicznym z wirnikiem klatkowym, który jest włączany za pomocą softstartu. Ale na razie tego nie zrobimy, ponieważ to rozwiązanie znacznie uprości obwód elektryczny windy, co nie jest bardzo skomplikowane.
Tak więc podzielimy nasz schemat na cztery strefy (patrz schemat windy na rysunku).
")
W strefie 1 niczego nie dotkniemy, ponieważ odpowiada za wywołanie dźwiękowe windy i kontroluje obecność napięcia w obwodzie. Strefa 2 z silnikiem, hamulcem elektromagnetycznym i stykami rozrusznika również się nie zmienia. Wszystkie urządzenia ze strefy 4 można usunąć, ponieważ kolejność włączenia styków w obwodzie wirnika silnika podczas jego uruchamiania będzie kontrolowana przez timery programowe. Pozostaje strefa 3. Główna modernizacja wpłynie na tę konkretną strefę.

Jako kontroler bierzemy firmę PLC Aries. Program dla niego będzie w języku Por. Moim zdaniem jest to najwygodniejszy język dla początkujących. On jest bardzo podobny na język bloków funkcjonalnych Fbdale z własnymi małymi funkcjami. Tak wielu kocha inny świetny język - język drabinkowy LD. Nie mam nic przeciwko, ale dalej Por Dla mnie wygodniej jest skompilować program dla PLC, więc użyłem tego języka, ale tutaj wszystko jest dla wszystkich. Do kompilacji programu używamy pakiet CoDeSys 2.3.

Program to zestaw bloków funkcjonalnych (I, LUB, NIE, wyzwalacze i timery). Program pracy windy towarowej w języku Por:

Początkowo będziemy potrzebować bloków I (element I). Na wyjściu elementu znajduje się jednostka logiczna (w programie -"PRAWDA") tylko wtedy, gdy jednostki logiczne znajdują się również na wszystkich wejściach. Jeśli stan choć jednego wejścia różni się od jedności, wówczas wyjście jest resetowane do zera (w programie - "Fałsz").
Ten element pomoże nam zorganizować wszystkie styki blokujące i styki bezpieczeństwa (wejścia dyskretne), a jak pamiętacie, jest ich 14 (w programie są oznaczone pod nazwą SQ1 - SQ14). Do wejścia bloku I łączymy również styk przekaźnika napięcia i przycisk „General stop” (SB1). Dla wygody nawiązałem wszystkie kontakty na 3 elementach I, a następnie wykorzystał inny, aby połączyć je w jeden łańcuch.
Domyślnie podczas dodawania do programu dowolna jednostka funkcjonalna ma 2 wejścia. Jeśli chcesz dodać dodatkowe wejście, musisz wskazać blok myszką, naciśnij prawy przycisk i wybierz „Blokuj wejście”. W ten sposób można dodać dowolną wymaganą liczbę dodatkowych danych wejściowych do bloku.

Przełącznik dźwigni jest podłączony do dwóch wejść kontrolera (w programie - „SA_verh” i „SA_niz”). Przełącznik w każdej z dwóch skrajnych pozycji dostarcza logiczną jednostkę do jednej z dwóch RS wyzwala („RS_verh” lub „RS_niz”). Wyzwalacz jest analogiem cewki rozruchowej ze stykiem blokującym w obwodzie sterowania przekaźnika.
Aby go włączyć, prześlij jednostkę logiczną do kontaktu „ZESTAW„wyłączyć - włączony”RESETUJ". Wyjście wyzwalacza ”Pytanie 1„przesyła sygnał do jednego z wyjść kontrolera -”KM1" lub „KM2„z którymi są połączone cewki elektromagnesu. Rozruszniki przełączają styki i sterują silnikiem.

Trzystopniowy start w programie jest zorganizowany za pomocą 2 timery „TON”. Przy zastosowaniu jednostki logicznej do wejścia timera „IN„liczy czas podany na wejściu”PT„i przełącza wyjście opóźnienia czasowego”Q"od logicznego zera do jednego. Po uruchomieniu pierwszego timera (T1) sygnałem z jego wyjścia (Q) czas zaczyna liczyć na drugim timerze (T2), a po czasie określonym na wejściu PT drugi timer wysyła również jednostkę logiczną na swoje wyjście (Q) .
Do wyjść kontrolera (w programie - KM3, KM4 i KM5) Podłączone są 3 cewki rozrusznika elektromagnetycznego. Pierwszy z nich włącza się natychmiast po włączeniu KM1 lub K.M2 i łączy maksymalną rezystancję z wirnikiem silnika, KM4 i KM5 włączyć za pomocą timera i na przemian zewrzeć część rezystancji rozruchowej. Po uruchomieniu silnika wszystkie trzy rozruszniki pozostają w pozycji włączonej.

Przedmiot LUB (logiczne OR) potrzebne do jednoczesnego uruchomienia jednego z dwóch głównych rozruszników, część obwodu odpowiedzialna za trzystopniowy rozruch silnika została uwzględniona w pracy. Jeśli na jednym z danych wejściowych elementu znajduje się jednostka logiczna „LUB„jednostka logiczna jest przesyłana na swoje wyjście, co oznacza, że do jej działania wystarczy sygnał na dowolnym z jego wejść.

Między timerem a wyjściami kontrolera I z jednym z odwrotnych wejść (koło wejściowe). W przypadku tego elementu jednostka logiczna na wyjściu pojawia się tylko wtedy, gdy sygnał jednostki logicznej jest przykładany do normalnego wejścia, a zero logiczne jest stosowane do odwrotnego.

Ten sam element, tylko z dwoma wejściami odwrotnymi, znajduje się obok wejść „SA_verh” i „SA_niz”, odbierając sygnały z przełącznika dźwigni. Jest to konieczne, aby upewnić się, że wszystkie rozruszniki na wyjściach są wyłączone, gdy przełącznik powróci do pozycji zerowej, gdy oba obwody w górę i w dół są otwarte.
Jeśli na wejściu takiego elementu występują dwa logiczne zera I daje jednostkę logiczną na wyjściu elementu. Sygnał ten przechodzi przez program na wejście wyzwalaczy „RESETUJ", wyzwalacze są resetowane do zera, a rozruszniki na wyjściach są wyłączone. Elementy I z jednym odwrotnym wejściem między zegarami i wyjściami KM3 i KM4 odłączyć te wyjścia i odpowiednio odłączyć rozruszniki odpowiedzialne za bocznikowanie rezystancji w obwodzie wirnika, gdy silnik jest zatrzymany.

Aby ustawić odwrotne wejście lub wyjście, należy przesunąć mysz do bloku funkcjonalnego, wybrać żądane wejście lub wyjście, nacisnąć prawy przycisk myszy i wybrać „Odwróć”. Podobnie każde odwrotne wejście lub wyjście można przekształcić na normalne.
Przedmioty I Numery 5 i 10 nie pozwalają na jednoczesne włączenie rozruszników odpowiedzialnych za napędzanie silnika w górę i w dół (ochrona przed zwarciem w stykach mocy rozruszników podczas ich włączania). Chociaż w tym schemacie z przełącznikiem dźwigniowym nie jest to możliwe.Ponieważ jednak styki blokujące tego typu były obecne w oryginalnym obwodzie przekaźnika, postanowiono zachować je w programie sterownika PLC.
I na koniec pozostaje zapewnić natychmiastowe wyłączenie silnika elektrycznego podczas otwierania dowolnego styku na wejściu. Obecność wyzwalaczy w obwodzie nie pozwoliła na to na początku. Aby obwód działał poprawnie w każdej sytuacji awaryjnej (wyzwolenie styków bezpieczeństwa, styków wyłączników awaryjnych, styku przekaźnika napięcia lub przycisku „Ogólne zatrzymanie”), dodano obwód dwa łańcuchy elementów NIE i LUB (4 i 7).
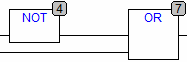
Element NOT poprzedza jednostkę logiczną na wejściu do logicznego zera na wyjściu i odwrotnie - zero na wejściu do jednostki na wyjściu. Czy możesz wyjaśnić, w jaki sposób działają łańcuchy od NOT i OR w programie? Napisz w komentarzach.
Emulacja programu CFC w CoDeSys
Po utworzeniu programu możesz go sprawdzić CoDeSys w trybie emulacji. Aby to zrobić, wybierz „Tryb emulacji” na karcie „Online”, kliknij przycisk „Połącz”, a następnie ustaw jednostkę logiczną na wszystkie wejścia -PRAWDA”, zapisz te wartości do programu, klikając„Ctrl" + F7 i kliknij F5 zacząć.
Tryb emulacji wCoDeSys:

Symulowanie przełączania wejścia („PRAWDA„i”Fałsz„) możesz spojrzeć na zmianę obwodów w kolorze niebieskim (ścieżka sygnału) i zmianę stanu wyjść. Po każdej zmianie stanu wejścia nie zapomnij zapisać tych wartości do programu, naciskając„Ctrl" + F7. Aby wyłączyć tryb emulacji, kliknij „Stop”, a następnie „Rozłącz” na karcie „Online” i odznacz „Tryb emulacji”.
Wniosek
Jeszcze raz chcę zauważyć, że ten projekt był wyłącznie związany z celami edukacyjnymi i nie został jeszcze przetestowany na prawdziwym programowalnym kontrolerze. Jeśli masz jakieś pytania i którekolwiek z powyższych pytań nie są jasne, zapytaj w komentarzach, postaram się na nie odpowiedzieć. I bardzo ważne jest dla mnie uzyskanie odpowiedzi na pytanie - czy powinienem nadal pisać artykuły na ten temat? Ogólnie rzecz biorąc, jestem gotowy wysłuchać wszelkich konstruktywnych komentarzy i sugestii.
Zobacz także na e.imadeself.com
: