ประเภท: ช่างไฟฟ้าสามเณร, ตัวควบคุมที่ตั้งโปรแกรมได้
จำนวนการดู: 8010
ความเห็นเกี่ยวกับบทความ: 4
ตัวอย่างของการอัพเกรดวงจรไฟฟ้าของลิฟต์ขนส่งสินค้าโดยใช้คอนโทรลเลอร์ที่ตั้งโปรแกรมได้ (PLC)
เมื่อเร็ว ๆ นี้หัวข้อของระบบอัตโนมัติของกระบวนการทางเทคโนโลยีต่าง ๆ ที่ใช้ตัวควบคุมที่ตั้งโปรแกรมได้ (PLC) ได้กลายเป็นที่นิยมมากขึ้น อย่างไรก็ตามเรื่องนี้มีบทความเชิงปฏิบัติน้อยมากบนอินเทอร์เน็ตที่มีตัวอย่างจริงของวิธีการเขียนโปรแกรม PLC เหล่านี้ หัวข้อนี้น่าสนใจมากเพราะ มันเป็นจุดเชื่อมต่อของอุปกรณ์ไฟฟ้าอิเล็กทรอนิกส์และการเขียนโปรแกรม เรียนรู้วิธีการเขียนโปรแกรม PLC เป็นไปได้โดยไม่ต้องมีแม้แต่พวกเขา โหมดการจำลองซึ่งมีอยู่ในแพ็คเกจซอฟต์แวร์ที่ทันสมัยทั้งหมดช่วยได้มากในการนี้
ในบทความนี้ฉันจะแสดงตัวอย่างของการแปลวงจรไฟฟ้าที่สร้างขึ้นบนอุปกรณ์รีเลย์ (สตาร์ทเตอร์, รีเลย์) เป็นโปรแกรมที่จะทำงานกับคอนโทรลเลอร์ ฉันต้องบอกทันทีว่านี่เป็นเพียงโครงการการศึกษาขนาดเล็กและไม่ได้หลอกว่าจะอธิบายอะไรมากไปกว่าการอธิบายหลักการพื้นฐานของการเขียนโปรแกรม PLC ด้วยตัวอย่างที่เป็นรูปธรรม
Freight Relay
โครงการเริ่มต้นสำหรับโครงการนี้เป็นโครงร่างที่ค่อนข้างง่ายของลิฟท์บรรทุก (ลิฟท์บรรทุก) ที่มีการควบคุมคันโยกมากกว่าสองชั้น แผนภาพแสดงในรูปด้านล่าง

รอกไฟฟ้าเทศบาลพร้อมเครื่องยนต์หนึ่งตัวที่สองป้าย
มีเพียงหนึ่งเครื่องยนต์ในวงจรซึ่งยกและลดลิฟท์ระหว่างสองชั้น นี่คือมอเตอร์แบบอะซิงโครนัสสามเฟสที่สามารถย้อนกลับได้ด้วยโรเตอร์เฟส 380 V ตัวต้านทานเริ่มต้นและหน้าสัมผัสของสตาร์ทเตอร์แม่เหล็กไฟฟ้าสามตัวเชื่อมต่อกับโรเตอร์ของเครื่องยนต์ทำให้เครื่องยนต์สตาร์ทได้ 3 ขั้นตอน วิธีแก้ปัญหานี้ช่วยในกระบวนการสตาร์ทเครื่องยนต์เพื่อลดกระแสเริ่มต้นและเพิ่มแรงบิดเริ่มต้น
สตาร์ทเครื่องยนต์เป็นแบบอัตโนมัติโดยใช้รีเลย์ความเร่งสามตัว (1RU - 3RU) นี่เป็นเครื่องจับเวลาแบบ DC 24 โวลต์ทั่วไป สำหรับพลังงานของพวกเขามีหม้อแปลงไฟฟ้าแบบขั้นบันไดและ เครื่องปรับ.
เบรคแม่เหล็กไฟฟ้าบล็อกสามเฟสเชื่อมต่อกับขั้วมอเตอร์ซึ่งเมื่อแรงดันไฟฟ้าถูกนำไปใช้กับมอเตอร์เบรกเพลาของมันและเมื่อแรงดันไฟฟ้าหายไปเพลามอเตอร์จะถูกยึดทันทีและคงอยู่ในตำแหน่งคงที่
เครื่องยนต์กลับด้าน โดยใช้หน้าสัมผัสของตัวเริ่มแม่เหล็กไฟฟ้าสองตัว (ในแผนภาพ B และ H) กำลังไฟของวงจรจ่ายผ่านตัวตัดวงจร (บนวงจร - WU) และเบรกเกอร์ (1A)
การรวมงานลิฟต์สามารถทำได้เฉพาะเมื่อมีแรงตึง มันถูกควบคุมโดยแรงดันไฟฟ้ารีเลย์ (PH) ซึ่งตั้งอยู่ทางด้านซ้ายของวงจร นอกจากนี้ยังมีซ็อกเก็ตและเสียงระฆังที่สามารถเปิดได้จากทุกไซต์เพื่อเรียกตัวนำ
ประตูของเพลาและห้องโดยสารเปิดและปิดด้วยตนเอง ลิฟต์ถูกควบคุมโดยใช้สวิตช์คันโยกไปยังตำแหน่งที่สาม - "ขึ้น", "ลง" และ "ศูนย์"
เมื่อมือจับถูกเคลื่อนย้ายไปยังตำแหน่งที่สูงที่สุดลิฟต์จะเริ่มเคลื่อนย้ายและเมื่อถึงชั้นที่ต้องการแล้วมือจับจะถูกเคลื่อนย้ายไปยังตำแหน่ง "ศูนย์" โดยอัตโนมัติ ในกรณีนี้หน้าสัมผัสในวงจรสวิทช์แตกขดลวดสตาร์ทไม่ทำงานเครื่องยนต์จะถูกตัดการเชื่อมต่อจากเครือข่ายรายชื่อในวงจรของโรเตอร์เปิดและลิฟต์หยุด หลังจากนั้นคุณสามารถเริ่มการเคลื่อนที่ของลิฟต์ในทิศทางตรงกันข้าม

ลิฟต์ขนส่งสินค้าเป็นอุปกรณ์ที่มีความเสี่ยงสูงและอยู่ในวงจร (เช่นในรูปแบบของลิฟต์ใด ๆ ) มีการเชื่อมต่อที่แตกต่างกันจำนวนมาก หน้าสัมผัสสวิตช์ จำกัด และหน้าสัมผัสของอุปกรณ์ป้องกันต่างๆ
ในรูปแบบนี้คือสวิตช์ (จบ) สำหรับการเดินทางที่ควบคุมการปิดประตูห้องโดยสารเพลาบนชั้นล่างและชั้นบนการยกและลดระดับห้องโดยสารเหนือโซนการทำงานส่วนบนและส่วนล่างการสัมผัสของ "หย่อนเชือกรอก" ที่เปิดเมื่อสายอ่อนหรือหลุด ลิฟท์โดยสาร, หน้าสัมผัสของตัว จำกัด ความเร็ว, ตัวจับและตัวปรับความตึงสายเคเบิล ทั้งหมด 14 เซ็นเซอร์แยก
เมื่อลิสต์ที่ปรากฏในรายการปรากฏขึ้นมอเตอร์ลิฟท์จะต้องปิดและเบรกทันทีดังนั้นเซ็นเซอร์ทั้งหมดหน้าสัมผัสรีเลย์แรงดันไฟฟ้าและปุ่ม“ หยุดทั่วไป” จะเชื่อมต่อเป็นอนุกรมกับวงจรคอยล์ของแอคทูเอเตอร์แม่เหล็กไฟฟ้าที่ควบคุมเครื่องยนต์
การสร้างโปรแกรม PLC สำหรับลิฟต์ขนส่ง
ภารกิจคือโดยไม่ต้องเปลี่ยนอะไรเลยในอุปกรณ์โดยหลักการแล้วการทำงานและการควบคุมของลิฟต์จะถ่ายโอนวงจรของมันจากมุมมองรีเลย์ที่ล้าสมัยไปยังตัวเลือกโดยใช้คอนโทรลเลอร์ที่ตั้งโปรแกรมได้
ข้อได้เปรียบของแบบฟอร์มโปรแกรมสำหรับควบคุมการติดตั้งคือในอนาคตหากต้องการโปรแกรมสามารถแก้ไขได้ง่ายปรับปรุงความสะดวกในการควบคุมลิฟท์เปลี่ยนตรรกะของการทำงานและปรับปรุงการทำงานของมัน แต่การกระทำเหล่านี้จะต้องมาพร้อมกับการเปลี่ยนแปลงในการออกแบบลิฟต์และการเพิ่มอุปกรณ์เพิ่มเติมอื่น ๆ เข้ากับวงจร ในรุ่นของเรางานดังกล่าวไม่ได้ถูกวาง
ในกรณีนี้มีการเสนอทางเลือกเพื่อปรับปรุงอุปกรณ์ไฟฟ้าของลิฟต์ขนส่งให้ทันสมัยโดยการเปลี่ยนรูปแบบการควบคุมด้วยวิธีการที่ตัวอย่างเช่นไม่มีการเปลี่ยนแปลงใด ๆ สำหรับผู้ใช้งานกลไกดังกล่าว
ดังนั้นเราจะบันทึกอุปกรณ์ควบคุมหลักสำหรับลิฟท์ - สวิตช์คันและปล่อยมอเตอร์แบบอะซิงโครนัสด้วยโรเตอร์เฟสด้วยการเริ่มต้นสามขั้นตอนแม้ว่าเราจะยังต้องการแทนที่ด้วยมอเตอร์แบบอะซิงโครนัสด้วยใบพัดกระรอกกรง แต่สำหรับตอนนี้เราจะไม่ทำเช่นนี้เนื่องจากวิธีนี้จะช่วยลดความซับซ้อนของวงจรไฟฟ้าของลิฟต์ซึ่งไม่ซับซ้อนมาก
ดังนั้นเราจะแบ่งแผนการของเราออกเป็นสี่โซน (ดูรูปลิฟต์ในรูป)
")
ในโซน 1 เราจะไม่แตะต้องอะไรเลยเพราะ เธอเป็นผู้รับผิดชอบในการเรียกเสียงของลิฟต์และควบคุมการมีแรงดันไฟฟ้าในวงจร โซน 2 ที่มีมอเตอร์เบรกแม่เหล็กไฟฟ้าและหน้าสัมผัสพลังงานของสตาร์ทเตอร์ก็ไม่เปลี่ยนแปลงเช่นกัน อุปกรณ์ทั้งหมดจากโซน 4 สามารถลบได้เพราะ ลำดับของการรวมผู้ติดต่อในวงจรโรเตอร์ของเครื่องยนต์เมื่อเริ่มทำงานจะถูกควบคุมโดยตัวจับเวลาซอฟต์แวร์ ยังคงอยู่ในโซน 3 ความทันสมัยที่สำคัญจะมีผลกับโซนนี้โดยเฉพาะ

ในฐานะผู้ควบคุมเราใช้ บริษัท PLC ราศีเมษ โปรแกรมสำหรับเขาจะเป็น ในภาษา สาร CFC. ในความคิดของฉันนี้เป็นภาษาที่สะดวกที่สุดสำหรับผู้เริ่มต้น เขาคล้ายกันมาก เป็นภาษาของบล็อกการทำงาน FBDแต่มีคุณสมบัติเล็ก ๆ น้อย ๆ ของตัวเอง หลายคนรักภาษาที่ยอดเยี่ยมอีกภาษาหนึ่ง - ภาษาบันได LD. ฉันไม่มีอะไรต่อต้าน แต่อยู่ สาร CFC มันสะดวกกว่าสำหรับฉันที่จะรวบรวมโปรแกรมสำหรับ PLC ดังนั้นฉันจึงใช้ภาษานี้ แต่ที่นี่ทุกอย่างมีไว้สำหรับทุกคน เพื่อรวบรวมโปรแกรมที่เราใช้ แพคเกจ CoDeSys 2.3.

โปรแกรมคือชุดของบล็อกการทำงาน (และ, หรือ, ไม่ทริกเกอร์และตัวจับเวลา) โปรแกรมการทำงานของลิฟต์ขนส่งสินค้าในภาษา สาร CFC:

เริ่มแรกเราจะต้องมีบล็อก และ (องค์ประกอบและ). ที่ผลลัพธ์ขององค์ประกอบที่เป็นหน่วยตรรกะ (ในโปรแกรม -"TRUE") เฉพาะเมื่อหน่วยทางลอจิกยังอยู่ในอินพุตทั้งหมด หากสถานะของแม้แต่หนึ่งอินพุตที่แตกต่างจากความสามัคคีแล้วเอาท์พุทจะถูกรีเซ็ตเป็นศูนย์ (ในโปรแกรม - "FALSE").
องค์ประกอบนี้จะช่วยให้เราจัดการรายชื่อผู้ติดต่อประสานงานและผู้ติดต่อด้านความปลอดภัย (อินพุตแบบแยก) และในขณะที่คุณจำได้มี 14 คน (ในโปรแกรมที่ระบุไว้ภายใต้ชื่อ SQ1 - SQ14). เพื่อการป้อนข้อมูลของบล็อก และ นอกจากนี้เรายังเชื่อมต่อหน้าสัมผัสของรีเลย์แรงดันไฟฟ้าและปุ่ม "General stop" (SB1) เพื่อความสะดวกฉันได้ทำการติดต่อกับ 3 องค์ประกอบ และแล้วใช้อีกอันรวมเข้าด้วยกันเป็นห่วงโซ่เดียว
ตามค่าเริ่มต้นเมื่อเพิ่มโปรแกรมหน่วยการทำงานใด ๆ จะมี 2 อินพุต หากคุณต้องการเพิ่มอินพุตเพิ่มเติมคุณจะต้องชี้ไปที่บล็อกด้วยเมาส์กดปุ่มขวาบนมันและเลือก "บล็อกอินพุต" ดังนั้นคุณสามารถเพิ่มจำนวนอินพุตที่ต้องการลงในบล็อกได้

สวิตช์คันโยกเชื่อมต่อกับอินพุตคอนโทรลเลอร์สองตัว (ในโปรแกรม - "SA_verh" และ "SA_niz") สวิตช์ในแต่ละตำแหน่งสุดขีดของมันจะส่งมอบหน่วยโลจิคัลให้กับหนึ่งในสองตำแหน่ง อาร์เอส ทริกเกอร์ ("RS_verh" หรือ "RS_niz") ทริกเกอร์เป็นอะนาล็อกของขดลวดสตาร์ทที่มีหน้าสัมผัสบล็อคในวงจรควบคุมรีเลย์
ในการเปิดใช้งานให้ส่งหน่วยโลจิคัลไปยังผู้ติดต่อ "ตลาดหลักทรัพย์"เพื่อปิดการใช้งาน - เปิด"RESET". เอาต์พุตทริกเกอร์ "ไตรมาสที่ 1"ส่งสัญญาณไปยังหนึ่งในตัวควบคุมเอาต์พุต -"KM1" หรือ "KM2"ซึ่งเชื่อมต่ออยู่ ขดลวดขดลวดแม่เหล็กไฟฟ้า. สตาร์ทเตอร์สลับหน้าสัมผัสและควบคุมมอเตอร์

การเริ่มต้นสามขั้นตอนในโปรแกรมถูกจัดระเบียบโดยใช้ 2 เครื่องจับเวลา "TON". เมื่อใช้หน่วยโลจิคัลกับอินพุตตัวจับเวลา "IN"เขานับเวลาที่ได้รับจากอินพุต"PT"และสลับเอาต์พุตการหน่วงเวลา"Q"จากศูนย์โลจิคัลถึงหนึ่งหลังจากทริกเกอร์ตัวแรก (T1) สัญญาณจากเอาท์พุท (Q) จะเริ่มนับถอยหลังในตัวจับเวลาที่สอง (T2) และหลังจากเวลาที่ระบุไว้ที่อินพุต PT ตัวจับเวลาที่สองจะส่งหน่วยตรรกะไปยังเอาต์พุต (Q) .
เพื่อควบคุมผลลัพธ์ (ในโปรแกรม - km3, KM4 และ KM5) ขดลวดแม่เหล็กไฟฟ้า 3 ขดลวดเชื่อมต่อกัน คนแรกของพวกเขาจะเปิดทันทีเมื่อคุณเปิด KM1 หรือ KM2 และเชื่อมต่อความต้านทานสูงสุดกับโรเตอร์ของมอเตอร์ KM4 และ KM5 เปิดใช้งานโดยตัวจับเวลาและส่วนลัดวงจรของความต้านทานเริ่มต้น หลังจากสตาร์ทเครื่องยนต์สตาร์ทเตอร์ทั้งสามยังคงอยู่ในตำแหน่งเปิด

ธาตุ หรือ (ตรรกะ OR) จำเป็นเพื่อเริ่มหนึ่งในสองหลักเริ่มพร้อมกันส่วนของวงจรที่รับผิดชอบสำหรับการเริ่มต้นของเครื่องยนต์สามขั้นตอนรวมอยู่ในงาน หากมีหน่วยตรรกะที่หนึ่งในอินพุตขององค์ประกอบ "หรือ"หน่วยโลจิคัลถูกส่งไปยังเอาต์พุตนั่นคือสำหรับการดำเนินการของสัญญาณที่อินพุตใด ๆ ก็เพียงพอแล้ว

ระหว่างตัวจับเวลาและเอาต์พุตคอนโทรลเลอร์ และ ด้วยหนึ่งในอินพุตผกผัน (วงกลมอินพุต) สำหรับองค์ประกอบนี้หน่วยโลจิคัลที่เอาต์พุตจะปรากฏต่อเมื่อสัญญาณโลจิคัลยูนิตถูกนำไปใช้กับอินพุตปกติและจะใช้โลจิคัลศูนย์ศูนย์กับผกผันหนึ่ง

องค์ประกอบเดียวกันมีเพียงอินพุทผกผันสองตัวเท่านั้นที่อยู่ถัดจากอินพุต "SA_verh" และ "SA_niz" ที่รับสัญญาณจากสวิตช์คันโยก นี่เป็นสิ่งจำเป็นเพื่อให้มั่นใจว่าสตาร์ตเตอร์ทั้งหมดของเอาต์พุตจะถูกปิดเมื่อสวิตช์กลับไปที่ตำแหน่งศูนย์เมื่อทั้งวงจรขึ้นและลงเปิดอยู่
หากมีสองศูนย์ตรรกะที่อินพุตขององค์ประกอบดังกล่าว และ ให้หน่วยตรรกะที่เอาท์พุทขององค์ประกอบ สัญญาณนี้ผ่านโปรแกรมไปยังอินพุตของทริกเกอร์ "RESET"ทริกเกอร์จะถูกรีเซ็ตเป็นศูนย์และ starters บนเอาต์พุตจะถูกปิดใช้งานองค์ประกอบ และ ด้วยอินพุตอินเวอร์สเดียวระหว่างตัวนับและเอาต์พุต km3 และ KM4 ตัดการเชื่อมต่อเอาท์พุทเหล่านี้และปลดสตาร์ตเตอร์ที่รับผิดชอบในการแยกความต้านทานในวงจรโรเตอร์เมื่อเครื่องยนต์หยุดทำงาน

ในการตั้งค่าอินพุทหรือเอาท์พุทแบบผกผันคุณต้องเลื่อนเมาส์ไปที่บล็อกการทำงานเลือกอินพุตหรือเอาต์พุตที่ต้องการกดปุ่มเมาส์ขวาและเลือก "กลับด้าน" เช่นเดียวกันอินพุตหรือเอาต์พุตผกผันใด ๆ สามารถแปลงเป็นปกติได้
องค์ประกอบ และ หมายเลข 5 และ 10 ไม่อนุญาตให้ starters รับผิดชอบในการขับมอเตอร์ขึ้นและลงในเวลาเดียวกัน (ป้องกันการลัดวงจรในหน้าสัมผัสกำลังไฟของ starters ขณะเปิดเครื่อง) แม้ว่าในรูปแบบนี้จะมีสวิตช์คัน แต่ก็ไม่สามารถทำได้แต่เนื่องจากการบล็อกหน้าสัมผัสของประเภทนี้มีอยู่ในวงจรรีเลย์ดั้งเดิมมันจึงตัดสินใจเก็บมันไว้ในโปรแกรมสำหรับ PLC
และในที่สุดก็ยังคงให้ปิดมอเตอร์ไฟฟ้าทันทีเมื่อเปิดหน้าสัมผัสใด ๆ ที่อินพุต การมีทริกเกอร์ในวงจรไม่อนุญาตให้ทำสิ่งนี้ในตอนแรก เพื่อให้วงจรทำงานอย่างถูกต้องในกรณีฉุกเฉินใด ๆ (การกระตุ้นความปลอดภัยของหน้าสัมผัสหน้าสัมผัสสวิตช์การเดินทางหน้าสัมผัสรีเลย์แรงดันไฟฟ้าหรือปุ่ม“ หยุดทั่วไป”) เพิ่มวงจร องค์ประกอบสองประการ ไม่ และ หรือ (4 และ 7)
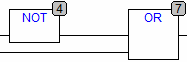
องค์ประกอบ NOT นำหน้าหน่วยโลจิคัลที่อินพุตไปยังศูนย์โลจิคัลที่เอาต์พุตและในทางกลับกัน - ศูนย์ที่อินพุตกับหน่วยที่เอาต์พุต คุณสามารถอธิบายว่าโซ่จากไม่และหรือทำงานในโปรแกรมได้อย่างไร เขียนในความคิดเห็น
การจำลองโปรแกรม CFC ใน CoDeSys
หลังจากสร้างโปรแกรมคุณสามารถตรวจสอบได้ CoDeSys ในโหมดการจำลอง ในการทำเช่นนี้เลือก "Emulation Mode" ในแท็บ "ออนไลน์" คลิกปุ่ม "เชื่อมต่อ" จากนั้นตั้งค่าหน่วยโลจิคัลเป็นอินพุตทั้งหมด - "TRUE", เขียนค่าเหล่านี้ไปยังโปรแกรมโดยคลิก"Ctrl" + F7 และคลิก F5 เพื่อเริ่ม
โหมดการจำลอง ในCoDeSys:

จำลองการสลับอินพุต ("TRUE"และ"FALSE") คุณสามารถดูการเปลี่ยนแปลงของวงจรในสีน้ำเงิน (เส้นทางสัญญาณ) และการเปลี่ยนแปลงสถานะของเอาต์พุตหลังจากการเปลี่ยนแปลงแต่ละครั้งในสถานะอินพุตอย่าลืมเขียนค่าเหล่านี้ลงในโปรแกรมโดยกด"Ctrl" + F7. หากต้องการปิดใช้งานโหมดการจำลองให้คลิก "หยุด" จากนั้นเลือก "ตัดการเชื่อมต่อ" บนแท็บ "ออนไลน์" และยกเลิกการเลือก "โหมดการจำลอง"
ข้อสรุป
อีกครั้งฉันต้องการที่จะทราบว่าโครงการนี้มีความเกี่ยวข้องเฉพาะกับเป้าหมายการศึกษาและยังไม่ได้ทดสอบกับตัวควบคุมที่ตั้งโปรแกรมได้จริง หากคุณมีคำถามใด ๆ และข้างต้นไม่ชัดเจนถามในความคิดเห็นฉันจะพยายามตอบพวกเขา และมันสำคัญมากสำหรับฉันที่จะได้รับคำตอบของคำถาม - ฉันควรเขียนบทความในหัวข้อนี้ต่อไปหรือไม่ โดยทั่วไปฉันพร้อมฟังความคิดเห็นและข้อเสนอแนะที่สร้างสรรค์
ดูได้ที่ e.imadeself.com
: