ประเภท: บทความเด่น » อิเล็กทรอนิคส์ในทางปฏิบัติ
จำนวนการดู: 41249
ความคิดเห็นเกี่ยวกับบทความ: 1
555 Integrated Timer การเดินทางแผ่นข้อมูล
 ครั้งหนึ่งเมื่อยี่สิบปีก่อนมีการผลิตอุปกรณ์อิเล็กทรอนิกส์เกือบทั้งหมดทั้งในประเทศและในอุตสาหกรรม ดังนั้นฐานองค์ประกอบทั้งหมด - ทรานซิสเตอร์, ไมโครวงจร, ไดโอด, ตัวต้านทานถูกนำมาใช้ในประเทศ
ครั้งหนึ่งเมื่อยี่สิบปีก่อนมีการผลิตอุปกรณ์อิเล็กทรอนิกส์เกือบทั้งหมดทั้งในประเทศและในอุตสาหกรรม ดังนั้นฐานองค์ประกอบทั้งหมด - ทรานซิสเตอร์, ไมโครวงจร, ไดโอด, ตัวต้านทานถูกนำมาใช้ในประเทศ
เพื่อให้เข้าใจสิ่งนี้ถึงแม้จะไม่ใหญ่มากตามมาตรฐานสมัยใหม่ก็ตาม แต่ก็มีการออกหนังสืออ้างอิง วรรณกรรมนี้หายากมากว่าในแง่ปัจจุบันมันควรจะเรียกว่าเป็นหนังสือที่ขายดี: ในร้านหนังสือวรรณกรรมทั้งหมดเกี่ยวกับอุปกรณ์อิเล็กทรอนิกส์ถูกขายหมดในทันที ผู้ซื้อหนังสือเหล่านี้ส่วนใหญ่เป็นนักวิทยุสมัครเล่นและวิศวกรซ่อม
เช่นเดียวกับในยานเดกซ์ มีทุกอย่าง
ปัจจุบันอุปกรณ์อิเล็กทรอนิกส์ทั้งหมดได้รับการพัฒนาและผลิตในต่างประเทศดังนั้นฐานองค์ประกอบทั้งหมดจึงเป็น "จากที่นั่น" สิ่งนี้สามารถสังเกตได้ชัดเจนในขั้นตอนของการรับส่วนประกอบวิทยุในตลาดวิทยุและในร้านค้าออนไลน์ หากคุณกำลังมองหาตัวอย่าง KR1006VI1 ผู้ขายที่มีประโยชน์จะให้คุณอย่างแน่นอน NE555. คุณสามารถหาตัวอย่างที่คล้ายกันได้มากมาย สถานะของกิจการนี้เป็นที่น่าพอใจเพราะมันเป็นบาปที่ต้องซ่อนอยู่ในยุคโซเวียตส่วนประกอบวิทยุเพียง "ลาก" จากองค์กร แต่ในเวลาเดียวกันก็ไม่พบทุกสิ่งที่ต้องการ
ตามธรรมชาติแล้วไม่สามารถหาไดเรกทอรีกระดาษสำหรับชิ้นส่วนที่นำเข้ามาได้ แต่ บริษัท - ผู้ผลิตสำหรับแต่ละทรานซิสเตอร์ไดโอดหรือไมโครเซอร์กิตในรูปแบบอิเล็กทรอนิกส์ส่วนใหญ่มักจะอยู่ในรูปแบบของไฟล์ * .pdf ที่วางจำหน่าย เอกสารทางเทคนิค - เอกสารข้อมูลซึ่งสามารถพบได้บนอินเทอร์เน็ต
ตอนนี้คุณไม่จำเป็นต้องอ่านคู่มือพันหน้าเพื่อค้นหาคุณสมบัติทางเทคนิคของทรานซิสเตอร์หรือไดโอดตัวเดียว ข้อมูลจำนวนนี้พอดีกับหน้าเพียงหนึ่งหรือสองหน้า ทรูมันควรจะสังเกตว่าถ้าแผ่นข้อมูลนี้เป็นสิ่งที่ซับซ้อนมากขึ้นเช่นสำหรับไมโครคอนโทรลเลอร์คำอธิบายอาจใช้เวลานานกว่าหนึ่งโหลหรือหลายร้อยหน้า
555 แผ่นข้อมูลตัวจับเวลาแบบบูรณาการ
ในรูปแบบอิเล็กทรอนิกส์ไฟล์ NE555.pdf มีขนาดประมาณ 600 กิโลไบต์ ในกรณีนี้คุณควรใส่ใจกับรายละเอียดนี้ เอกสารข้อมูลแผ่นข้อมูลเช่นเดียวกับตัวจับเวลา 555 ผลิตโดยหลาย บริษัท ตัวจับเวลายังคงเป็นตัวนับไม่มีการเปลี่ยนแปลงภายในหรือภายนอก แต่ปริมาณของไฟล์ข้อมูลในแผ่นข้อมูลอาจแตกต่างกันจากร้อยด้วยขนาดเล็กกิโลไบต์ถึงเกือบเจ็ดร้อย มันเป็นประมาณ 25 หน้า
ความแตกต่างนี้เกิดจากความจริงที่ว่าในคำอธิบายบางอย่างคุณสามารถค้นหาเฉพาะพารามิเตอร์ไฟฟ้า, pinout, ชื่อของสัญญาณและวงจรภายใน และที่อื่น ๆ อีกมากมายมีรูปแบบการสลับสูตรการคำนวณและอื่น ๆ อีกมากมาย ดังนั้น, คุณควรดูไฟล์ * .pdf มากมาย ถัดไปจะมีการพิจารณาหลายรูปแบบจากแผ่นข้อมูล NE555.pdf
Multivibrator จากแผ่นข้อมูล
ในบทความก่อนหน้า "การออกแบบในตัวจับเวลาครบถ้วน 555" รูปที่ 9 เป็นไดอะแกรมของเครื่องปรับจังหวะการสั่นด้วยตนเอง วงจรนี้ไม่ได้ใช้พิน 7 ซึ่งได้รับการออกแบบมาเป็นพิเศษสำหรับการปล่อยประจุตัวตั้งเวลาและตัวเก็บประจุจะถูกประจุและคายประจุผ่านตัวต้านทาน R1 ดังนั้นพัลส์เอาต์พุตของตัวสร้างนี้สามารถเป็นพัลส์รูปแบบคดเคี้ยวเท่านั้น รอบการทำงานของพัลส์ดังกล่าวคือ 2
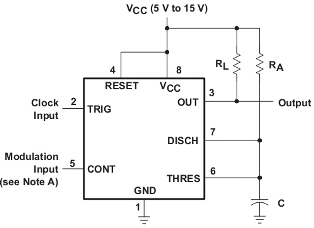
เพื่อให้ได้พัลส์ของรอบการทำงานที่ต้องการผู้ผลิตแนะนำวงจรที่แตกต่างกันเล็กน้อยดังแสดงในรูปที่ 1
เชิงอรรถในรูปบอกว่าควรเชื่อมต่อขา 5 CONT กับสายสามัญผ่านตัวเก็บประจุขนาดเล็กเพื่อป้องกันการรบกวน เกี่ยวกับข้อสรุปนี้จะอธิบายไว้ด้านล่าง

รูปที่ 1
และรูปที่ 2 แสดงแผนภาพเวลา

รูปที่ 2
เมื่อเปิดเครื่องตัวเก็บประจุ C จะถูกปล่อยออกดังนั้น TRIG pin 2 จะต่ำซึ่งทำให้ OUT OUT (pin 3) ถูกตั้งค่าไว้ที่ระดับสูงตัวเก็บประจุ C เริ่มชาร์จผ่านตัวต้านทาน (Ra + Rb) จนกระทั่งแรงดันไฟฟ้าผ่านไปถึงค่าสูงสุดของตัวจับเวลา (0.67 * Vcc) เวลาในการชาร์จจะเป็น tH = 0.693 * (RA + RB) * C
ด้วยวิธีนี้ระยะเวลาการเต้นของชีพจรจะเกิดขึ้น
หลังจากเวลานี้เอาต์พุตตัวจับเวลาจะเปลี่ยนไปที่ระดับต่ำและตัวเก็บประจุ C จะถูกปล่อยผ่านตัวต้านทาน RB และเอาต์พุตพิเศษ 7 DISCH (คายประจุ) คายประจุจะดำเนินต่อไปจนกระทั่งแรงดันไฟฟ้าผ่านตัวเก็บประจุลดลงถึง (0.33 * V) เกณฑ์การตอบสนอง เปรียบเทียบ หนุน เอาต์พุตของตัวจับเวลาถูกตั้งค่าไว้สูงและรอบจะเริ่มขึ้นอีกครั้ง เวลาดิสชาร์จคือ tL = 0.693 * (RB) * C. นี่จะเป็นเวลาหยุดชั่วคราว
ระยะเวลาการทำซ้ำของชีพจรเท่ากับผลรวมของระยะเวลาการเต้นของชีพจรและหยุดชั่วคราว = tH + tL + 0.693 * (RA + 2RB) * C และอัตราการทำซ้ำของชีพจรจะเป็นความถี่≈ 1.44 / ((RA + 2RB) * C)
รูปที่ 3 แสดงโนโมแกรมที่นำมาจากแผ่นข้อมูล ช่วยให้คุณสามารถกำหนดความถี่ของพัลส์อย่างน้อยโดยประมาณด้วยการผสมผสานระหว่างตัวเก็บประจุและตัวต้านทานเวลา แม่นยำยิ่งขึ้นความถี่ถูกเลือกระหว่างการคำนวณและต่อมาระหว่างการปรับจูน ท้ายที่สุดมันก็ไม่มีความลับสำหรับทุกคนที่สูตรอิเล็กทรอนิกส์จำนวนมากให้ผลลัพธ์โดยประมาณ
เมื่อใช้โนโมแกรมแบบย้อนกลับก็เป็นไปได้เช่นกันในการเลือกพารามิเตอร์ของสายโซ่ RC ที่ความถี่ที่กำหนด
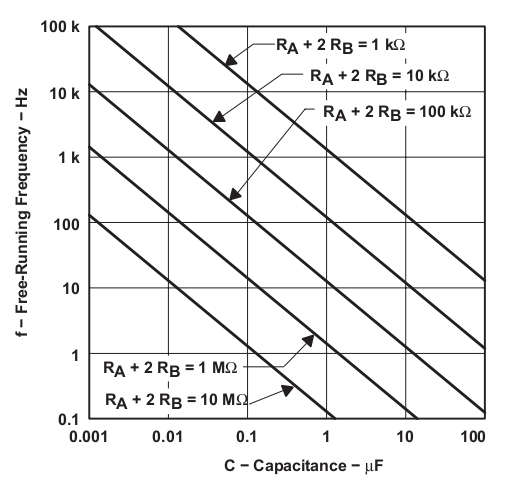
รูปที่ 3
คุณควรใส่ใจกับรายละเอียดดังกล่าว: ในสูตรข้างต้นไม่มีแรงดันไฟฟ้า ดังนั้นความถี่ของการแกว่งและรอบการทำงานของพวกเขาไม่ได้ขึ้นอยู่กับโภชนาการ ค่าเหล่านี้ถูกตั้งค่าโดยพารามิเตอร์ของห่วงโซ่ RC เท่านั้น ความเสถียรของความถี่พัลส์ที่เอาต์พุตของตัวจับเวลายังขึ้นอยู่กับความเสถียรของพารามิเตอร์เหล่านี้
ข้อสรุปที่ลึกลับ 5 ต่อ
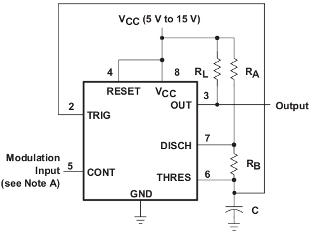
CONT ย่อมาจาก CONTROL Control ที่นี่มีการใช้แรงดันไฟฟ้าควบคุมซึ่งบางครั้งเรียกว่าการมอดูเลต ด้วยคุณสามารถเปลี่ยนค่าคงที่ของขีด จำกัด ของตัวเปรียบเทียบซึ่งทำให้สามารถเปลี่ยนเวลาในการชาร์จ - ปลดประจุของตัวเก็บประจุการตั้งค่าเวลา การควบคุมนี้ช่วยให้คุณสร้างเครื่องกำเนิดไฟฟ้าที่มีการมอดูเลต PWM และสัญญาณชีพจรเวลา วงจรโมดูเลเตอร์ PWM แสดงในรูปที่ 4 และแผนภาพเวลาในรูปที่ 5
รูปที่ 4
หากคุณดูวงจรอย่างใกล้ชิดเราสามารถพูดได้ว่านี่เป็นช็อตเดียวที่คุ้นเคย คำอธิบายของเขาได้รับในบทความ "การออกแบบในตัวจับเวลาครบถ้วน 555". เฉพาะขา 5 CONT เท่านั้นที่ไม่ได้ใช้ในวงจรออสซิลเลเตอร์เดียวแนะนำให้ "กราวด์" ผ่านตัวเก็บประจุที่แสดงโดยเส้นประ ไดอะแกรมกำหนดเวลาที่แสดงในรูปที่ 5 ช่วยให้เราสามารถสรุปได้ดังต่อไปนี้:
รูปที่ 5
ด้วยตัวของมันเองตัวปรับการเต้นของชีพจรไม่ได้ผลิตเช่น ไม่ใช่เครื่องกำเนิดไฟฟ้า
พัลส์ภายนอกถูกป้อนเข้าสู่อินพุตในกรณีนี้มีความถี่คงที่และรอบการทำงาน
แรงดันไฟฟ้าแบบมอดูเลตสลับจะถูกนำไปใช้กับอินพุตควบคุม CONT ภายใต้การกระทำที่เปลี่ยนเกณฑ์ของตัวเปรียบเทียบอินพุตมีการเปลี่ยนแปลง แรงดันไฟฟ้าแบบมอดูเลตสามารถจัดหาได้โดยตรงหรือผ่านตัวเก็บประจุแบบแยกดังที่อธิบายไว้ในหมายเหตุประกอบกับวงจรในแผ่นข้อมูล
เกณฑ์สำหรับการทำงานของเครื่องมือเปรียบเทียบจะกำหนดแรงดันไฟฟ้าของประจุ - การคายประจุของตัวเก็บประจุแบบตั้งเวลา C สิ่งที่ได้มาจากสิ่งนี้แสดงให้เห็นอย่างชัดเจนในแผนภาพด้านล่างในรูปที่ 5
พัลส์ออสซิลเลเตอร์
วงจรของมันแสดงในรูปที่ 6
รูปที่ 6
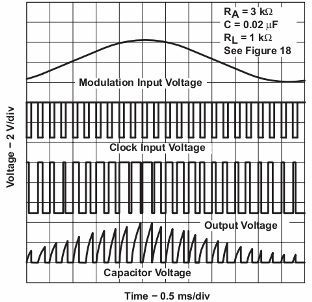
วงจรดังกล่าวทำซ้ำวงจรมัลติไวเบรเตอร์ที่แสดงในรูปที่ 1 เพียง แต่ใช้พิน 5 ต่อเท่านั้นซึ่งจะใช้แรงดันไฟฟ้าควบคุมรูปสามเหลี่ยม แผนภาพเวลาของเครื่องกำเนิดไฟฟ้านี้แสดงในรูปที่ 7
ควรสังเกตว่าแผนภูมิเวลาทั้งหมดแสดงเวลาสแกนแนวนอนและความไวของช่องโก่งแนวตั้ง นั่นคือก่อนหน้าเราไม่ได้เป็นเพียงแค่การวาดด้วยมือเปล่า แต่เป็นออสซิลโลแกรมที่แท้จริง ดังนั้นจึงสามารถใช้เพื่อกำหนดความกว้างของแรงดันมอดูเลตเช่นเดียวกับระยะเวลาและความถี่ของสัญญาณอินพุตและเอาต์พุตพัลส์
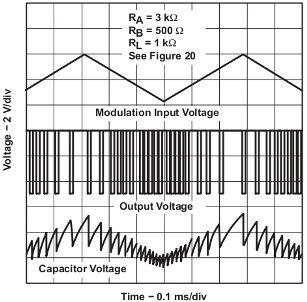
รูปที่ 7
แรงดันไฟฟ้าในตัวเก็บประจุหรือค่อนข้างจะเป็นซองจดหมายทำซ้ำรูปร่างของสัญญาณมอดูเลตและความถี่ของพัลส์เอาต์พุตจะแตกต่างกันไปขึ้นอยู่กับแรงดันมอดูเลต ด้วยแรงดันมอดูเลตขั้นต่ำความถี่เอาต์พุตของตัวสร้างจะสูงสุด เมื่อแรงดันไฟฟ้าเพิ่มขึ้นความถี่เอาต์พุตจะลดลงและถึงขั้นต่ำเมื่อแรงดันมอดูเลตถึงค่าสูงสุด
เมื่อแรงดันมอดูเลตเมื่อผ่านสูงสุดจะเริ่มลดลงความถี่เอาต์พุตของเครื่องกำเนิดไฟฟ้าจะเริ่มเพิ่มขึ้น - วงจรจะทำซ้ำอีกครั้ง แอมพลิจูดของประจุ - การคายประจุของตัวเก็บประจุที่แปรผันตามเวลาก็เปลี่ยนไปตามอิทธิพลของแรงดันมอดูเลต
นอกจากวงจรที่พิจารณาแล้วแผ่นข้อมูลยังพิจารณาวงจรของเครื่องตรวจจับการสูญเสียชีพจรหนึ่งครั้งที่กล่าวถึงแล้วเครื่องแบ่งความถี่และวงจรจับเวลาตามลำดับที่แสดงในรูปที่ 8
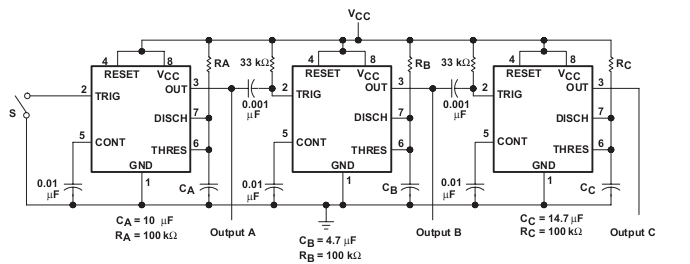
รูปที่ 8
ตรรกะของตัวจับเวลานั้นง่ายมาก: เมื่อคุณกดปุ่ม S ตัวจับเวลา A จะเริ่มและแรงดันไฟฟ้าระดับสูงจะปรากฏขึ้นที่เอาต์พุตของเอาท์พุท A ซึ่งหลังจากความเร็วชัตเตอร์ที่กำหนดโดยวงจรเวลา RA * CA จะต่ำลง ความแตกต่างเชิงลบของพัลส์นี้ผ่านวงจรที่แตกต่าง 0.001uF * 33KΩจะถูกป้อนไปยังอินพุต TRIG ของการยิงครั้งเดียวครั้งต่อไปและเริ่มต้น
ที่เอาต์พุตของการถ่ายครั้งที่สองครั้งเดียวตั้งค่าระดับสูง เมื่อการหน่วงเวลาเสร็จสิ้นนัดที่สองที่หนึ่งเริ่มต้นที่สาม โดยหลักการแล้วมันเป็นไปได้ที่จะเพิ่มสายโซ่อนุกรมนี้ของการถ่ายภาพหนึ่งนัดถึงระยะอนันต์ แผนภาพเวลาสำหรับเซลล์ทั้งสามแสดงในรูปที่ 9

รูปที่ 9
ดูแผ่นข้อมูล!
นี่คือข้อมูลที่เป็นประโยชน์เกี่ยวกับงานในกรณีนี้ตัวจับเวลาอินทิกรัล 555 สามารถรวบรวมได้โดยศึกษาเอกสารข้อมูล และบ่อยครั้งในฟอรัมอิเล็กทรอนิกส์หลายแห่งที่คุณต้องเห็นกล่องโต้ตอบดังกล่าว: ช่วยเหลือ, pliz, ประกอบวงจร แต่เปิดมัน - มันไม่ทำงาน และบางครั้งมันก็ฟังดูเป็นคำตอบดูแผ่นข้อมูล!
ความต่อเนื่องของบทความ:จับเวลา 555. ตัวแปลงแรงดันไฟฟ้า
ดูได้ที่ e.imadeself.com
: