ประเภท: บทความเด่น » อิเล็กทรอนิคส์ในทางปฏิบัติ
จำนวนการดู: 182545
ความเห็นเกี่ยวกับบทความ: 5
555 การออกแบบตัวจับเวลาแบบบูรณาการ
 เส้นทางสู่วิทยุสมัครเล่นเริ่มขึ้นตามกฎโดยมีความพยายามในการประกอบวงจรอย่างง่าย หากทันทีหลังจากการประกอบวงจรเริ่มแสดงสัญญาณของชีวิต - กระพริบ, เสียงบี๊บ, คลิกหรือพูดคุยจากนั้นเส้นทางสู่วิทยุสมัครเล่นเกือบจะเปิด สำหรับ "พูดคุย" ส่วนใหญ่มันจะไม่ทำงานทันทีคุณจะต้องอ่านหนังสือจำนวนมากบัดกรีและตั้งวงจรจำนวนหนึ่งอาจจะเขียนชิ้นส่วนขนาดใหญ่หรือเล็ก (โดยเฉพาะขนาดเล็ก)
เส้นทางสู่วิทยุสมัครเล่นเริ่มขึ้นตามกฎโดยมีความพยายามในการประกอบวงจรอย่างง่าย หากทันทีหลังจากการประกอบวงจรเริ่มแสดงสัญญาณของชีวิต - กระพริบ, เสียงบี๊บ, คลิกหรือพูดคุยจากนั้นเส้นทางสู่วิทยุสมัครเล่นเกือบจะเปิด สำหรับ "พูดคุย" ส่วนใหญ่มันจะไม่ทำงานทันทีคุณจะต้องอ่านหนังสือจำนวนมากบัดกรีและตั้งวงจรจำนวนหนึ่งอาจจะเขียนชิ้นส่วนขนาดใหญ่หรือเล็ก (โดยเฉพาะขนาดเล็ก)
แต่แฟลชและทวีตเตอร์นั้นได้มาจากเกือบทุกคนในคราวเดียว และองค์ประกอบที่ดีกว่า แบบบูรณาการจับเวลา NE555 ค้นหาการทดลองเหล่านี้ก็จะไม่ประสบความสำเร็จ อันดับแรกให้ดูที่วงจรกำเนิด แต่ก่อนหน้านั้นมาดูเอกสารประกอบที่เป็นกรรมสิทธิ์ - DATA SHEET ก่อนอื่นให้ใส่ใจกับโครงร่างกราฟิกของตัวจับเวลาซึ่งแสดงในรูปที่ 1
และรูปที่ 2 แสดงรูปภาพของตัวจับเวลาจากไดเรกทอรีภายในประเทศ ที่นี่มีให้สำหรับความเป็นไปได้ในการเปรียบเทียบการกำหนดสัญญาณสำหรับพวกเขาและของเรานอกจากนี้ไดอะแกรมการทำงาน“ ของเรา” จะแสดงในรายละเอียดที่ชัดเจนยิ่งขึ้น
ต่อไปนี้เป็นภาพวาดอีกสองภาพที่นำมาจากแผ่นข้อมูล เป็นเพียงคำแนะนำจากผู้ผลิต

รูปที่ 1

รูปที่ 2
555 Single Vibrator
รูปที่ 3 แสดงวงจรสั่นเดียว ไม่นี่ไม่ใช่ครึ่งหนึ่งของเครื่องปรับความถี่แม้ว่าเขาจะไม่สามารถสร้างความผันผวนได้ เขาต้องการความช่วยเหลือจากภายนอกแม้แต่น้อย

รูปที่ 3 ไดอะแกรมเขย่าเดี่ยว
ตรรกะของการกระทำแบบ one-shot นั้นค่อนข้างง่าย ชีพจรระดับต่ำระยะสั้นจะถูกใช้เพื่อทริกเกอร์อินพุต 2 ดังที่แสดงในภาพ ด้วยเหตุนี้เอาต์พุต 3 จึงสร้างพัลส์เป็นรูปสี่เหลี่ยมผืนผ้าของระยะเวลาΔT = 1.1 * R * C หากเราแทน R ในโอห์มในสูตรและ C เป็น farads ดังนั้นเวลา T จะกลายเป็นวินาที ดังนั้นด้วย kilo-ohms และ microfarads ผลลัพธ์จะเป็นมิลลิวินาที
และรูปที่ 4 แสดงวิธีสร้างพัลส์ทริกเกอร์โดยใช้ปุ่มเชิงกลอย่างง่ายแม้ว่ามันอาจจะเป็นองค์ประกอบเซมิคอนดักเตอร์ - ไมโครเซอร์กิตหรือทรานซิสเตอร์
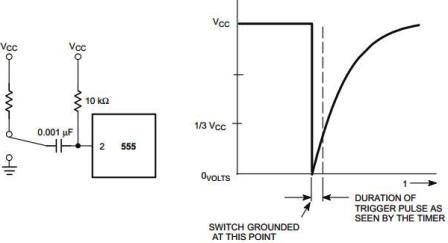
รูปที่ 4
โดยทั่วไปแล้วการถ่ายภาพครั้งเดียว (บางครั้งเรียกว่าการถ่ายภาพเดี่ยวและทหารผู้กล้ามีคำว่า kipp relay ที่ใช้งาน) ทำงานดังนี้ เมื่อกดปุ่มชีพจรระดับต่ำที่ขา 2 ทำให้เกิดเอาต์พุตของตัวจับเวลา 3 เพื่อตั้งค่าระดับสูง ด้วยเหตุผลที่ดีสัญญาณนี้ (พิน 2) ในไดเรกทอรีภายในประเทศเรียกว่าทริกเกอร์
ทรานซิสเตอร์ที่เชื่อมต่อกับเทอร์มินัล 7 (DISCHARGE) ปิดในสถานะนี้ ดังนั้นไม่มีอะไรป้องกันการชาร์จตัวเก็บประจุเวลา C ในระหว่างการถ่ายทอด kipp แน่นอนไม่มี 555 ทุกอย่างถูกทำบนโคมไฟที่ดีที่สุดในทรานซิสเตอร์ไม่ต่อเนื่อง แต่อัลกอริทึมของการทำงานเหมือนกัน
ในขณะที่ตัวเก็บประจุกำลังชาร์จแรงดันไฟฟ้าระดับสูงจะยังคงอยู่ที่เอาท์พุท หากในเวลานี้มีการใช้พัลส์อื่นกับอินพุต 2 สถานะของเอาต์พุตจะไม่เปลี่ยนแปลงระยะเวลาของพัลส์เอาต์พุตไม่สามารถลดหรือเพิ่มขึ้นด้วยวิธีนี้และการถ่ายภาพเดี่ยวจะไม่รีสตาร์ท
อีกอย่างคือถ้าคุณใช้พัลส์รีเซ็ต (ระดับต่ำ) ถึง 4 พิน ผลลัพธ์ 3 จะแสดงระดับต่ำทันที สัญญาณ“ รีเซ็ต” มีลำดับความสำคัญสูงสุดและสามารถกำหนดได้ตลอดเวลา
เมื่อประจุเพิ่มขึ้นแรงดันไฟฟ้าผ่านตัวเก็บประจุจะเพิ่มขึ้นและในที่สุดก็มาถึงระดับ 2 / 3U ดังที่อธิบายไว้ในบทความก่อนหน้านี้เป็นระดับการตอบสนองขีด จำกัด ของตัวเปรียบเทียบส่วนบนซึ่งนำไปสู่การรีเซ็ตตัวจับเวลาซึ่งเป็นจุดสิ้นสุดของพัลส์เอาต์พุต
ที่ขา 3 ระดับต่ำจะปรากฏขึ้นและในขณะเดียวกันทรานซิสเตอร์ VT3 จะเปิดขึ้นซึ่งจะทำการประจุตัวเก็บประจุ C ซึ่งจะทำให้การก่อตัวของพัลส์เสร็จสมบูรณ์ถ้าหลังจากจบพัลส์เอาต์พุต แต่ไม่ใช่ก่อนหน้าให้พัลส์ทริกอีกอันจากนั้นเอาต์พุตจะถูกสร้างเอาต์พุตเช่นเดียวกับครั้งแรก
แน่นอนว่าสำหรับการใช้งานตามปกติของนัดเดียวชีพจรไกจะต้องสั้นกว่าพัลส์ที่สร้างขึ้นที่เอาต์พุต
รูปที่ 5 แสดงกำหนดการสั่นเดี่ยว

รูปที่ 5 กำหนดการสั่นเดี่ยว
ฉันจะใช้เครื่องสั่นเดี่ยวได้อย่างไร
หรืออย่างที่แมว Matroskin เคยพูดไว้ว่า:“ การยิงครั้งเดียวครั้งนี้จะมีประโยชน์อะไร?” สามารถตอบได้ว่ามันใหญ่พอ ความจริงก็คือช่วงระยะเวลาที่ล่าช้าซึ่งสามารถรับได้จากการยิงครั้งเดียวสามารถทำได้ไม่เพียงไม่กี่มิลลิวินาที แต่ยังมาถึงหลายชั่วโมงด้วย ทุกอย่างขึ้นอยู่กับพารามิเตอร์ของโซ่เวลา RC
ที่นี่คุณเป็นวิธีแก้ปัญหาเกือบจะพร้อมสำหรับการให้แสงสว่างทางเดินยาว มันเพียงพอที่จะเสริมตัวจับเวลาด้วยรีเลย์เอ็กเซกคิวทีฟหรือวงจรไทริสเตอร์อย่างง่ายและใส่ปุ่มสองสามปุ่มที่ปลายทางเดิน เขากดปุ่มทางเดินผ่านและไม่จำเป็นต้องกังวลเกี่ยวกับการปิดหลอดไฟ ทุกอย่างจะเกิดขึ้นโดยอัตโนมัติเมื่อสิ้นสุดระยะเวลาล่าช้า นี่เป็นเพียงข้อมูลเพื่อประกอบการพิจารณา แน่นอนว่าการให้แสงสว่างในทางเดินยาวนั้นไม่ใช่ทางเลือกเดียวสำหรับการใช้เครื่องสั่นเพียงครั้งเดียว
จะตรวจสอบ 555 ได้อย่างไร
วิธีที่ง่ายที่สุดคือการบัดกรีวงจรอย่างง่ายสำหรับสิ่งนี้จะไม่มีความจำเป็นสำหรับชิ้นส่วนบานพับยกเว้นตัวต้านทานผันแปรเพียงตัวเดียวและ LED เพื่อระบุสถานะของเอาต์พุต
microcircuit ควรเชื่อมต่อหมุด 2 และ 6 และใช้แรงดันไฟฟ้ากับพวกเขาเปลี่ยนแปลงโดยตัวต้านทานตัวแปร คุณสามารถเชื่อมต่อโวลต์มิเตอร์หรือไฟ LED เข้ากับเอาท์พุทตัวจับเวลาด้วยตัวต้านทานที่ จำกัด
แต่คุณไม่สามารถบัดกรีอะไรได้นอกจากนี้ยังทำการทดลองแม้จะมี“ การปรากฏตัวของการขาด” ของจุลภาคที่เกิดขึ้นจริง การศึกษาที่คล้ายกันสามารถทำได้โดยใช้โปรแกรมจำลอง Multisim แน่นอนการศึกษาดังกล่าวเป็นแบบดั้งเดิมมาก แต่อย่างไรก็ตามจะช่วยให้คุณคุ้นเคยกับตรรกะของตัวจับเวลา 555 ผลลัพธ์ของ "งานห้องปฏิบัติการ" แสดงในรูปที่ 6, 7 และ 8

รูปที่ 6
ในรูปนี้คุณจะเห็นว่าแรงดันไฟฟ้าขาเข้าถูกควบคุมโดยตัวต้านทานตัวแปร R1 คุณสามารถพิจารณาคำจารึก“ Key = A” ซึ่งระบุว่าค่าตัวต้านทานสามารถเปลี่ยนแปลงได้โดยการกดปุ่ม A ขั้นตอนการปรับขั้นต่ำคือ 1% มันมีเพียง saddens ที่เป็นไปได้ในการควบคุมทิศทางการต้านทานที่เพิ่มขึ้นเท่านั้น "
ในรูปนี้ตัวต้านทานจะถูก "ถอย" ไปที่ "กราวด์" แรงดันไฟฟ้าของมอเตอร์ใกล้กับศูนย์ (สำหรับความคมชัดจะวัดด้วยมัลติมิเตอร์) ด้วยตำแหน่งของเครื่องยนต์เอาต์พุตของตัวจับเวลาจึงสูงดังนั้นทรานซิสเตอร์เอาท์พุตจึงปิดและ LED1 ไม่สว่างขึ้นเนื่องจากลูกศรสีขาวระบุ
รูปต่อไปนี้แสดงให้เห็นว่าแรงดันไฟฟ้าเพิ่มขึ้นเล็กน้อย

รูปที่ 7
แต่การเพิ่มขึ้นไม่ได้เกิดขึ้นเช่นนั้น แต่เป็นไปตามขอบเขตที่แน่นอนและกล่าวคือเกณฑ์สำหรับการดำเนินการเปรียบเทียบ ความจริงก็คือว่า 1/3 และ 2/3 ซึ่งแสดงเป็นเปอร์เซ็นต์ทศนิยมจะเป็น 33.33 ... และ 66.66 ... ตามลำดับ เป็นเปอร์เซ็นต์ที่ส่วนอินพุตของตัวต้านทานผันแปรในโปรแกรม Multisim แสดงขึ้น ด้วยแรงดันไฟฟ้า 12V จะกลายเป็น 4 และ 8 โวลต์ซึ่งสะดวกสำหรับการวิจัย
ดังนั้นรูปที่ 6 แสดงให้เห็นว่าตัวต้านทานถูกนำเสนอที่ 65% และแรงดันไฟฟ้าของมันคือ 7.8V ซึ่งน้อยกว่า 8 โวลต์ที่คำนวณเล็กน้อย ในกรณีนี้สัญญาณไฟ LED เอาต์พุตจะปิดเช่น เอาต์พุตตัวจับเวลายังคงสูง

รูปที่ 8
การเพิ่มขึ้นเล็กน้อยของแรงดันไฟฟ้าที่อินพุต 2 และ 6 เพียง 1 เปอร์เซ็นต์ (โปรแกรมไม่ทำให้เป็นไปได้น้อยลง) นำไปสู่การจุดระเบิดของ LED1 ดังที่แสดงในรูปที่ 8 - ลูกศรใกล้ LED เปลี่ยนเป็นสีแดง พฤติกรรมของวงจรนี้แสดงให้เห็นว่าเครื่องจำลอง Multisim ทำงานได้ค่อนข้างแม่นยำ
หากคุณยังคงเพิ่มแรงดันไฟฟ้าที่หมุด 2 และ 6 จะไม่มีการเปลี่ยนแปลงเกิดขึ้นที่เอาต์พุตของตัวจับเวลา
555 เครื่องกำเนิดไฟฟ้าตัวตั้งเวลา
ช่วงความถี่ที่เกิดจากตัวจับเวลาค่อนข้างกว้าง: จากความถี่ต่ำสุดระยะเวลาที่สามารถเข้าถึงได้หลายชั่วโมงจนถึงความถี่หลายสิบกิโลเฮิร์ตซ์ ทุกอย่างขึ้นอยู่กับองค์ประกอบของโซ่ไทม์มิ่ง
หากไม่จำเป็นต้องใช้รูปคลื่นสี่เหลี่ยมอย่างเคร่งครัดสามารถสร้างความถี่สูงสุดได้หลายเมกะเฮิรตซ์ บางครั้งสิ่งนี้ค่อนข้างยอมรับได้ - แบบฟอร์มไม่สำคัญ แต่มีแรงกระตุ้น บ่อยครั้งที่ความประมาทดังกล่าวเกี่ยวกับรูปร่างของพัลส์ได้รับอนุญาตในเทคโนโลยีดิจิตอล ตัวอย่างเช่นตัวนับชีพจรตอบสนองต่อขอบที่เพิ่มขึ้นหรือชีพจรที่ลดลง เห็นด้วยในกรณีนี้ "ฉาก" ของพัลส์ไม่สำคัญ
เครื่องกำเนิดคลื่นสี่เหลี่ยมจตุรัส
หนึ่งในตัวแปรที่เป็นไปได้ของเครื่องกำเนิดพัลส์รูปคดเคี้ยวแสดงในรูปที่ 9

รูปที่ 9 โครงร่างของเครื่องกำเนิดไฟฟ้าพัลส์รูปคดเคี้ยว
ไดอะแกรมเวลาของเครื่องกำเนิดไฟฟ้าแสดงในรูปที่ 10

รูปที่ 10 ไดอะแกรมกำหนดเวลาของเครื่องกำเนิดไฟฟ้า
กราฟด้านบนแสดงให้เห็นถึงสัญญาณขาออก (ขา 3) ของตัวจับเวลา และกราฟด้านล่างแสดงให้เห็นว่าแรงดันไฟฟ้าของตัวเก็บประจุแบบตั้งเวลาเปลี่ยนแปลงอย่างไร
ทุกอย่างเกิดขึ้นตามที่พิจารณาแล้วในวงจรสั่นเดียวที่แสดงในรูปที่ 3 แต่ไม่ได้ใช้พัลส์ทริกเกอร์เดี่ยวที่ขา 2
ความจริงก็คือเมื่อเปิดวงจรบนตัวเก็บประจุ C1 แรงดันเป็นศูนย์ก็คือมันจะเปลี่ยนเอาท์พุทตัวจับเวลาให้อยู่ในระดับสูงดังแสดงในรูปที่ 10 ตัวเก็บประจุ C1 เริ่มชาร์จผ่านตัวต้านทาน R1
แรงดันไฟฟ้าข้ามตัวเก็บประจุเพิ่มขึ้นแบบทวีคูณจนกว่าจะถึงขีด จำกัด บน 2/3 * U ดังนั้นตัวจับเวลาจะเปลี่ยนไปเป็นสถานะศูนย์ดังนั้นตัวเก็บประจุ C1 จึงเริ่มไหลไปที่ระดับการทำงานต่ำกว่า 1/3 * U เมื่อถึงเกณฑ์นี้ระดับสูงจะถูกตั้งค่าไว้ที่เอาต์พุตของตัวจับเวลาและทุกอย่างจะเริ่มต้นใหม่อีกครั้ง ช่วงเวลาใหม่ของการแกว่งกำลังก่อตัวขึ้น
ที่นี่คุณควรใส่ใจกับความจริงที่ว่าตัวเก็บประจุ C1 ถูกประจุและปล่อยออกมาผ่านตัวต้านทาน R1 เดียวกัน ดังนั้นเวลาในการชาร์จและคายประจุจึงเท่ากันดังนั้นรูปร่างของการแกว่งที่เอาท์พุตของเครื่องกำเนิดไฟฟ้าดังกล่าวจึงอยู่ใกล้กับคดเคี้ยว
ความถี่การสั่นของเครื่องกำเนิดไฟฟ้าดังกล่าวอธิบายโดยสูตรที่ซับซ้อนมาก f = 0.722 / (R1 * C1) หากความต้านทานของตัวต้านทาน R1 ในการคำนวณแสดงเป็นโอห์มและความจุของตัวเก็บประจุคือ C1 ใน Farads ดังนั้นความถี่จะเป็นเฮิรตซ์ หากในสูตรนี้ความต้านทานจะแสดงเป็นกิโลโอห์ม (KOhm) และความจุของตัวเก็บประจุเป็นไมโครไมโคร (μF) ผลที่ได้จะเป็นกิโลเฮิร์ตซ์ (KHz) ในการรับออสซิลเลเตอร์ที่มีความถี่ที่ปรับได้ก็เพียงพอแล้วที่จะแทนที่ตัวต้านทาน R1 ด้วยตัวแปร
เครื่องกำเนิดพัลส์รอบวัฏจักรหน้าที่เปลี่ยนแปลงได้
แน่นอนคดเคี้ยวเป็นสิ่งที่ดี แต่บางครั้งสถานการณ์ที่เกิดขึ้นที่ต้องมีการควบคุมวงจรการทำงานของพัลส์ นี่คือวิธีการควบคุมความเร็วของมอเตอร์กระแสตรง (ตัวควบคุม PWM) ซึ่งใช้แม่เหล็กถาวร
พัลส์เวฟสแควร์เรียกว่าคดเคี้ยวซึ่งเวลาพัลส์ (ระดับสูง t1) เท่ากับเวลาหยุดชั่วคราว (ระดับต่ำ t2) ชื่อดังกล่าวในอุปกรณ์อิเล็กทรอนิกส์มาจากสถาปัตยกรรมที่คดเคี้ยวเรียกว่าภาพวาดของอิฐ จำนวนพัลส์และเวลาหยุดทั้งหมดเรียกว่าช่วงเวลาพัลส์ (T = t1 + t2)
หน้าที่และรอบการทำงาน
อัตราส่วนของช่วงเวลาพัลส์กับระยะเวลา S = T / t1 เรียกว่ารอบการทำงาน ค่านี้ไม่มีขนาด ในทางเดินคดเคี้ยวตัวบ่งชี้นี้คือ 2 เนื่องจาก t1 = t2 = 0.5 * T ในวรรณคดีอังกฤษแทนที่จะใช้วัฏจักรหน้าที่มักใช้ค่าตอบแทนซึ่งกันและกัน - วัฏจักรหน้าที่ (อังกฤษ. รอบการทำงาน) D = 1 / S แสดงเป็นเปอร์เซ็นต์
หากคุณปรับปรุงเครื่องกำเนิดไฟฟ้าเล็กน้อยที่แสดงในรูปที่ 9 คุณสามารถรับเครื่องกำเนิดไฟฟ้าที่มีรอบการทำงานที่ปรับได้ แผนภาพของเครื่องกำเนิดไฟฟ้าดังกล่าวแสดงในรูปที่ 11
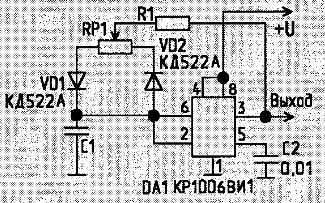
รูปที่ 11
ในโครงร่างนี้ประจุของตัวเก็บประจุ C1 เกิดขึ้นผ่านวงจร R1, RP1, VD1เมื่อแรงดันไฟฟ้าผ่านตัวเก็บประจุถึงระดับสูงสุดที่ 2/3 * U ตัวจับเวลาจะสลับไปที่ระดับต่ำและตัวเก็บประจุ C1 จะปล่อยประจุผ่านวงจร VD2, RP1, R1 จนกระทั่งแรงดันไฟฟ้าผ่านตัวเก็บประจุลดลงจนถึงระดับต่ำกว่า 1/3 * U หลังจากนั้น โดยวัฏจักรนั้นซ้ำ
การเปลี่ยนตำแหน่งของเครื่องยนต์ RP1 ทำให้สามารถควบคุมระยะเวลาของการชาร์จและการคายประจุ: หากระยะเวลาของการชาร์จเพิ่มขึ้นเวลาการคายประจุจะลดลง ในกรณีนี้ระยะเวลาการทำซ้ำของพัลส์ยังคงไม่เปลี่ยนแปลงเฉพาะรอบการทำงานหรือรอบการทำงานการเปลี่ยนแปลง สะดวกสำหรับทุกคน
จากตัวจับเวลา 555 คุณสามารถออกแบบไม่เพียง แต่กำเนิด แต่ยังมีอุปกรณ์ที่มีประโยชน์อีกมากมายซึ่งจะกล่าวถึงในบทความถัดไป อย่างไรก็ตามมีโปรแกรม - เครื่องคิดเลขสำหรับคำนวณความถี่ของเครื่องกำเนิดไฟฟ้าในตัวจับเวลา 555 และในโปรแกรม - ตัวจำลอง Multisim มีแท็บพิเศษสำหรับวัตถุประสงค์เหล่านี้
Boris Aladyshkin https://e.imadeself.com/th
ความต่อเนื่องของบทความ: 555 Integrated Timer การเดินทางแผ่นข้อมูล
ดูได้ที่ e.imadeself.com
: