ประเภท: บทความเด่น » อิเล็กทรอนิคส์ในทางปฏิบัติ
จำนวนการดู: 162,237
ความเห็นเกี่ยวกับบทความ: 4
วิธีที่จะทำให้การถ่ายทอดเวลาทำมันด้วยตัวเอง
 การถ่ายทอดเวลาคืออะไร? ขั้นตอนวิธีการปฏิบัติ ถ่ายทอดเวลา ง่ายพอ แต่บางครั้งอาจทำให้เกิดความชื่นชม หากเราจำเครื่องซักผ้าเก่าซึ่งเรียกว่า "ถังด้วยมอเตอร์" อย่างรักใคร่แล้วการกระทำของตัวจับเวลาก็ชัดเจนมาก: พวกเขาหมุนปุ่มติ๊กนิดหน่อยมีบางอย่างเริ่มเห็บข้างในและเครื่องยนต์เริ่มทำงาน
การถ่ายทอดเวลาคืออะไร? ขั้นตอนวิธีการปฏิบัติ ถ่ายทอดเวลา ง่ายพอ แต่บางครั้งอาจทำให้เกิดความชื่นชม หากเราจำเครื่องซักผ้าเก่าซึ่งเรียกว่า "ถังด้วยมอเตอร์" อย่างรักใคร่แล้วการกระทำของตัวจับเวลาก็ชัดเจนมาก: พวกเขาหมุนปุ่มติ๊กนิดหน่อยมีบางอย่างเริ่มเห็บข้างในและเครื่องยนต์เริ่มทำงาน
ทันทีที่ตัวชี้ที่จับมาถึงการแบ่งขนาดเป็นศูนย์การล้างจะสิ้นสุดลง ต่อมารถยนต์ที่มีตัวจับเวลาสองตัวปรากฏขึ้น - การล้างและการปั่น ในเครื่องดังกล่าวเวลาที่ถูกสร้างขึ้นในรูปแบบของถังโลหะซึ่งกลไกนาฬิกาถูกซ่อนอยู่และภายนอกมีเพียงรายชื่อไฟฟ้าและปุ่มควบคุม
เครื่องซักผ้าที่ทันสมัย - เครื่องอัตโนมัติ (พร้อมการควบคุมแบบอิเล็กทรอนิกส์) มีการถ่ายทอดเวลาและมันเป็นไปไม่ได้ที่จะทำให้มันแยกออกเป็นส่วน ๆ หรือส่วนหนึ่งบนแผงควบคุม การหน่วงเวลาทั้งหมดได้มาจากโปรแกรมโดยใช้ไมโครคอนโทรลเลอร์ หากคุณพิจารณาวงจรของเครื่องซักผ้าอัตโนมัติอย่างใกล้ชิดจำนวนเวลาที่ล่าช้าก็ไม่สามารถนับได้ หากความล่าช้าทั้งหมดนี้เกิดขึ้นในรูปแบบของกลไกนาฬิกาของที่กล่าวมาแล้วก็จะไม่มีพื้นที่เพียงพอในร่างกายของเครื่องซักผ้า
ถ่ายทอดเวลา พวกเขาจะใช้ไม่เพียง แต่ในเครื่องซักผ้าเช่นในเตาอบไมโครเวฟด้วยความช่วยเหลือของความล่าช้าเวลาไม่เพียง แต่เวลาการทำงานจะถูกควบคุม แต่ยังพลังงานความร้อน สิ่งนี้ทำได้ดังนี้: แรงดันไฟฟ้า RF เปิดเป็นเวลา 5 วินาทีและปิดเป็นเวลา 5 วินาที พลังงานความร้อนเฉลี่ยในกรณีนี้คือ 50% เพื่อให้ได้พลังงาน 30% การเปิด RF เป็นเวลา 3 วินาทีก็เพียงพอแล้ว ดังนั้นในสถานะปิดหลอดไฟความถี่สูงจะอยู่ที่ 7 วินาที แน่นอนตัวเลขเหล่านี้อาจแตกต่างกันเช่น 50 และ 50 หรือ 30 และ 70 เพียงที่นี่อัตราส่วนของเวลาเปิดปิดของ HF จะปรากฏขึ้น
กล่าวถึงเครื่องซักผ้าเก่าจะได้รับด้วยเหตุผล มันอยู่ที่นี่ในตัวอย่างนี้คุณสามารถมองเห็นแม้กระทั่งรู้สึกด้วยมือของคุณว่าการถ่ายทอดเวลาทำงานอย่างไร
หมุนข้อเหวี่ยงตามเข็มนาฬิกาไม่มีอะไรมากไปกว่าความเร็วชัตเตอร์ แอคชูเอเตอร์ (มอเตอร์ไฟฟ้า) เปิดใช้งานทันที ในกรณีนี้ความเร็วชัตเตอร์เป็นนาทีจะกำหนดมุมของการหมุนของที่จับ ดังนั้นจึงมีการดำเนินการสองอย่างพร้อมกัน: โหลดเวลาเปิดรับแสงและเริ่มการหน่วงเวลาเอง หลังจากเวลาที่กำหนดผ่านไปตัวกระตุ้นจะถูกปิด รีเลย์หรือตัวจับเวลาทั้งหมดทำงานได้แม้โดยประมาณแม้กระทั่งตัวที่ซ่อนอยู่ภายใน ไมโครคอนโทรลเลอร์ (MK).
ตั้งแต่เครื่องจักรจนถึงอุปกรณ์อิเล็กทรอนิกส์
วิธีรับการหน่วงเวลาโดยใช้ MK
ความเร็วของ MK สมัยใหม่นั้นสูงมากถึงหลายสิบ mips (การดำเนินงานหลายล้านต่อวินาที) ดูเหมือนว่าเมื่อไม่นานที่ผ่านมามีการต่อสู้เพื่อ 1 mips บนคอมพิวเตอร์ส่วนบุคคล ตอนนี้แม้แต่ MKs ที่เลิกใช้แล้วตัวอย่างเช่นตระกูล 8051 สามารถเติมเต็ม 1 mips ได้อย่างง่ายดาย ดังนั้นจะใช้เวลาหนึ่งวินาทีในการดำเนินการ 1,000,000 ครั้ง
นี่เป็นวิธีแก้ปัญหาที่ดูเหมือนว่าจะทำให้เกิดความล่าช้าได้อย่างไร เพียงแค่ทำการดำเนินการเดียวกันล้านครั้ง สามารถทำได้ค่อนข้างง่ายหากการดำเนินการนี้วนลูปในโปรแกรม แต่ปัญหาคือนอกเหนือไปจากการดำเนินการนี้ MK สำหรับวินาทีไม่สามารถทำอะไรได้อีก ที่นี่คุณมีความสำเร็จด้านวิศวกรรมที่นี่คุณมี mips! และถ้าคุณต้องการความเร็วชัตเตอร์หลายสิบวินาทีหรือนาที?
ตัวจับเวลา - อุปกรณ์สำหรับการนับเวลา
เพื่อป้องกันความอับอายดังกล่าวตัวประมวลผลไม่เพียง แต่อุ่นเครื่องเท่านั้นโดยใช้คำสั่งที่ไม่จำเป็นซึ่งจะไม่ทำสิ่งใดที่มีประโยชน์เลยหากคุณไม่เข้าไปดูรายละเอียดตัวจับเวลาจะเป็นตัวนับไบนารีที่นับพัลส์ที่สร้างโดยวงจรพิเศษภายใน MK
ตัวอย่างเช่นในตระกูล MK 8051 ชีพจรนับจะถูกสร้างขึ้นเมื่อมีการดำเนินการแต่ละคำสั่งเช่น ตัวจับเวลาจะนับจำนวนคำสั่งเครื่องที่ดำเนินการ ในขณะเดียวกันหน่วยประมวลผลกลาง (CPU) นั้นทำงานเงียบ ๆ ในการทำงานของโปรแกรมหลัก
สมมติว่าตัวจับเวลาเริ่มนับ (มีคำสั่งตัวนับการเริ่มต้นสำหรับสิ่งนี้) จากศูนย์ แต่ละพัลส์จะเพิ่มเนื้อหาของตัวนับทีละตัวและในที่สุดก็มาถึงค่าสูงสุด หลังจากนั้นเนื้อหาของตัวนับจะถูกรีเซ็ต ช่วงเวลานี้เรียกว่า "เคาน์เตอร์ล้น" นี่เป็นจุดสิ้นสุดของการหน่วงเวลาอย่างแม่นยำ (จดจำเครื่องซักผ้า)
สมมติว่าตัวจับเวลาเป็น 8 บิตจากนั้นจะสามารถใช้ในการคำนวณค่าในช่วง 0 ... 255 หรือตัวนับจะล้นทุก 256 พัลส์ หากต้องการทำให้ความเร็วชัตเตอร์สั้นลงก็พอที่จะเริ่มนับได้ตั้งแต่เริ่มต้น แต่จากค่าที่แตกต่างกัน ในการรับมันก็พอที่จะโหลดค่านี้ในเคาน์เตอร์แล้วเริ่มเคาน์เตอร์ (อีกครั้งจำเครื่องซักผ้า) จำนวนที่โหลดไว้ล่วงหน้านี้คือมุมการหมุนของรีเลย์เวลา
ตัวจับเวลาที่มีความถี่ในการทำงาน 1 mips จะช่วยให้คุณได้รับความเร็วชัตเตอร์สูงสุด 255 microseconds แต่คุณต้องใช้เวลาสองสามวินาทีหรือไม่กี่นาทีคุณควรทำอย่างไร
ปรากฎว่าทุกอย่างค่อนข้างง่าย การจับเวลาล้นแต่ละครั้งเป็นเหตุการณ์ที่ทำให้โปรแกรมหลักถูกขัดจังหวะ เป็นผลให้ CPU สลับไปยังโปรแกรมย่อยที่เกี่ยวข้องซึ่งข้อความที่ตัดตอนมาเล็ก ๆ นี้สามารถเพิ่มสิ่งใด ๆ ได้อย่างน้อยไม่เกินหลายชั่วโมงหรือหลายวัน
รูทีนการบริการขัดจังหวะโดยปกติจะสั้นไม่เกินสองสามคำสั่งหลังจากนั้นอีกครั้งจะกลับสู่โปรแกรมหลักซึ่งยังคงทำงานจากที่เดิม ลองข้อความที่ตัดตอนมานี้โดยการทำซ้ำคำสั่งง่ายๆที่กล่าวไว้ข้างต้น! แม้ว่าในบางกรณีคุณต้องทำเช่นนั้น
ในการทำเช่นนี้มีคำสั่ง NOP ในระบบคำสั่งของตัวประมวลผลซึ่งไม่ได้ทำอะไรเลยเพียงใช้เวลาของเครื่อง มันสามารถใช้ในการจองหน่วยความจำและเมื่อสร้างความล่าช้าเวลาเพียงสั้นมากในคำสั่งของสองสามไมโครวินาที
ใช่ผู้อ่านจะบอกว่าเขาต้องทนทุกข์ทรมาน! จากเครื่องซักผ้าโดยตรงไปยังไมโครคอนโทรลเลอร์ และสิ่งที่อยู่ระหว่างจุดสุดยอดเหล่านี้?
รีเลย์เวลาคืออะไร?
ดังกล่าวแล้ว ภารกิจหลักของการถ่ายทอดเวลาคือการหน่วงเวลาระหว่างสัญญาณอินพุตและสัญญาณเอาต์พุต ความล่าช้านี้สามารถสร้างได้หลายวิธี รีเลย์เวลาเป็นกลไก (อธิบายไว้แล้วที่จุดเริ่มต้นของบทความ), ระบบเครื่องกลไฟฟ้า (ยังขึ้นอยู่กับเครื่องจักรเพียงฤดูใบไม้ผลิเท่านั้นที่ได้รับบาดเจ็บจากแม่เหล็กไฟฟ้า) เช่นเดียวกับอุปกรณ์ทำให้หมาด ๆ ตัวอย่างของรีเลย์ดังกล่าวคือสวิตช์เวลาเกี่ยวกับลมที่แสดงในรูปที่ 1

ภาพ 1. รีเลย์เวลานิวเมติก
รีเลย์ประกอบด้วยไดรฟ์แม่เหล็กไฟฟ้าและตัวยึดนิวเมติก รีเลย์คอยล์สามารถใช้งานได้ที่แรงดันไฟฟ้า 12 ... 660V AC (รวม 16 เรตติ้ง) ด้วยความถี่ 50 ... 60Hz ความเร็วชัตเตอร์สามารถเริ่มได้ทั้งเมื่อมีการทริกเกอร์หรือเมื่อไดรฟ์แม่เหล็กไฟฟ้าขึ้นอยู่กับรุ่นของรีเลย์
เวลาถูกกำหนดโดยสกรูที่ควบคุมส่วนตัดของรูเพื่อให้อากาศออกจากห้อง รีเลย์เวลาที่อธิบายแตกต่างกันในพารามิเตอร์ที่ไม่เสถียรดังนั้นเมื่อใดก็ตามที่เป็นไปได้จะใช้รีเลย์เวลาอิเล็กทรอนิกส์เสมอ ในปัจจุบันรีเลย์ดังกล่าวมีทั้งกลไกและนิวแมติกสามารถพบได้ในอุปกรณ์โบราณเท่านั้นซึ่งยังไม่ได้ถูกแทนที่ด้วยอุปกรณ์ที่ทันสมัยและแม้กระทั่งในพิพิธภัณฑ์
รีเลย์เวลาอิเล็กทรอนิกส์
บางทีหนึ่งในสิ่งที่พบได้บ่อยที่สุดคือ VL-60 ... 64 relay series และอื่น ๆ ตัวอย่างเช่น VL-100 ... 140 รีเลย์ตัวจับเวลาทั้งหมดนี้สร้างขึ้นบนชิปพิเศษ KR512PS10 ลักษณะที่ปรากฏของรีเลย์สายโอเวอร์เฮดแสดงในรูปที่ 2

รูปที่ 2 ชุดรีเลย์เวลา VL
วงจรของรีเลย์เวลา VL - 64 จะแสดงในรูปที่ 3

รูปที่ 3 โครงร่างของตัวจับเวลา VL - 64
เมื่อแรงดันถูกส่งไปยังอินพุตผ่านสะพาน rectifier VD1 ... VD4 แรงดันไฟฟ้าผ่านตัวปรับความเสถียรของทรานซิสเตอร์ KT315A จะถูกส่งไปยังชิป DD1 ซึ่งเป็นเครื่องกำเนิดไฟฟ้าภายในซึ่งเริ่มสร้างพัลส์ ความถี่ของพัลส์ถูกควบคุมโดยตัวต้านทานผันแปร PPB-3B (มันคือที่แสดงบนแผงด้านหน้าของรีเลย์) ซึ่งเชื่อมต่อในซีรีย์กับตัวเก็บประจุไทม์มิ่ง 5100 pF ซึ่งมีความอดทน 1% และ TKE ขนาดเล็กมาก
พัลส์ที่ได้รับจะถูกนับโดยตัวนับพร้อมค่าสัมประสิทธิ์การหารซึ่งกำหนดโดยการสลับขั้วของ microcircuit M01 ... M05 ในรีเลย์ซีรี่ส์ VL สวิตช์นี้ทำงานที่โรงงาน ค่าสัมประสิทธิ์การแบ่งสูงสุดของตัวนับทั้งหมดถึง 235,929,600 ตามเอกสารสำหรับ microcircuit ที่ความถี่ของ oscillator หลัก 1 Hz ความเร็วชัตเตอร์สามารถเข้าถึงนานกว่า 9 เดือน! ตามที่นักพัฒนาแล้วนี่ค่อนข้างเพียงพอสำหรับแอปพลิเคชันใด ๆ
PIN 10 ของชิป END คือจุดสิ้นสุดของความเร็วชัตเตอร์ซึ่งเชื่อมต่อกับอินพุต 3 - ST start - stop ทันทีที่แรงดันไฟฟ้าสูงปรากฏขึ้นที่เอาท์พุท END การหยุดนับพัลส์และแรงดันไฟฟ้าระดับสูงจะปรากฏที่เอาต์พุตที่ 9 ของ Q1 ซึ่งจะเปิดทรานซิสเตอร์ KT605 และรีเลย์ที่เชื่อมต่อกับตัวสะสม KT605 จะเดินทาง
รีเลย์เวลาที่ทันสมัย
ตามกฎแล้วจะทำใน MK มันง่ายกว่าที่จะเขียนโปรแกรมไมโครเซอร์กิตที่เป็นกรรมสิทธิ์ของสำเร็จรูปเพิ่มปุ่มไม่กี่ตัวบ่งชี้ดิจิตอลกว่าประดิษฐ์สิ่งใหม่และปรับเวลา รีเลย์ดังกล่าวแสดงในรูปที่ 4

รูปที่ 4 การถ่ายทอดเวลาของไมโครคอนโทรลเลอร์
ทำไมรีเลย์เวลาที่ลงมือทำด้วยตัวเอง?
และถึงแม้ว่าจะมีการสลับเวลาเป็นจำนวนมาก แต่เกือบทุกรสนิยมบางครั้งที่บ้านคุณต้องทำสิ่งที่คุณทำเองบ่อยครั้งมาก ๆ แต่การออกแบบดังกล่าวมักจะให้เหตุผลตัวเองอย่างสมบูรณ์และสมบูรณ์ นี่คือบางส่วนของพวกเขา
ทันทีที่เราเพิ่งตรวจสอบการทำงานของ KR512PS10 microcircuit เป็นส่วนหนึ่งของรีเลย์สายเหนือศีรษะเราจะต้องเริ่มพิจารณาวงจรมือสมัครเล่นจากมัน รูปที่ 5 แสดงวงจรจับเวลา

รูปที่ 5 จับเวลาบนไมโครเซอร์โว KR524PS10
Microcircuit ใช้พลังงานจาก Parametric stabilizer R4, VD1 ที่มีแรงดันไฟฟ้าคงที่ประมาณ 5 V ในขณะที่กำลังเพิ่มขึ้นวงจร R1C1 จะสร้างพัลส์รีเซ็ต microcircuit สิ่งนี้เริ่มต้นเครื่องกำเนิดไฟฟ้าภายในความถี่ที่กำหนดโดยโซ่ R2C2 และตัวนับภายในของ microcircuit เริ่มนับพัลส์
จำนวนของพัลส์เหล่านี้ (อัตราส่วนการหารเคาน์เตอร์) ถูกตั้งค่าโดยการสลับขั้วของ microcircuit M01 ... M05 ด้วยตำแหน่งที่ระบุในแผนภาพค่าสัมประสิทธิ์นี้จะเป็น 78643200 จำนวนพัลส์นี้ประกอบขึ้นเป็นระยะเวลาเต็มของสัญญาณที่เอาท์พุทเอ็นด์ (ขา 10) Pin 10 เชื่อมต่อกับ pin 3 ST (start / stop)
ทันทีที่มีการตั้งค่าเอาต์พุต END ให้อยู่ในระดับสูง (นับครึ่งหนึ่งของช่วงเวลา) ตัวนับจะหยุด ในเวลาเดียวกันเอาต์พุต Q1 (พิน 9) ยังตั้งค่าระดับสูงซึ่งเปิดทรานซิสเตอร์ VT1 ผ่านทรานซิสเตอร์แบบเปิดรีเลย์ K1 เปิดทำงานซึ่งควบคุมโหลดด้วยหน้าสัมผัส
เพื่อเริ่มการหน่วงเวลาก็พอที่จะปิดและเปิดรีเลย์อีกครั้ง แผนภาพเวลาของสัญญาณ END และ Q1 แสดงในรูปที่ 6

รูปที่ 6 แผนภาพแสดงเวลาของสัญญาณ END และ Q1
ด้วยค่าของห่วงโซ่เวลา R2C2 ที่ระบุไว้บนแผนภาพความถี่ของเครื่องกำเนิดไฟฟ้าจะอยู่ที่ประมาณ 1,000 Hz ดังนั้นเวลาหน่วงสำหรับการเชื่อมต่อที่ระบุของเทอร์มินัล M01 ... M05 จะอยู่ที่ประมาณสิบชั่วโมง
หากต้องการปรับความเร็วชัตเตอร์นี้อย่างละเอียดควรดำเนินการดังต่อไปนี้ เชื่อมต่อเทอร์มินัล M01 ... M05 กับตำแหน่ง "Seconds_10" ดังที่แสดงในตารางในรูป 7.
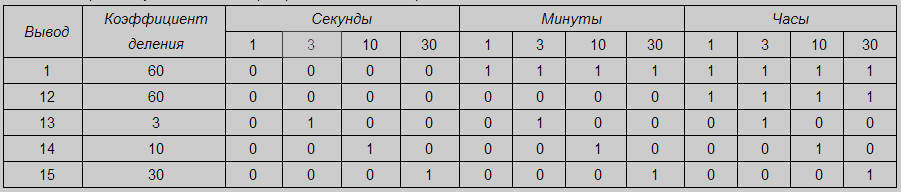
รูปที่ 7 ตารางการตั้งค่าตัวจับเวลา (คลิกที่ภาพเพื่อขยาย).
ด้วยการเชื่อมต่อนี้ให้หมุนตัวต้านทานตัวแปร R2 เพื่อปรับความเร็วชัตเตอร์เป็นเวลา 10 วินาที โดยนาฬิกาจับเวลา จากนั้นเชื่อมต่อเทอร์มินัล M01 ... M05 ดังที่แสดงในแผนภาพ
ไดอะแกรมอื่นบน KR512PS10 แสดงในรูปที่ 8

รูปที่ 8 การถ่ายทอดเวลาของชิป KR512PS10
ตัวจับเวลาอื่นบนชิป KR512PS10
เริ่มต้นด้วยความสนใจ KR512PS10 ที่แม่นยำยิ่งขึ้นกับสัญญาณ END ซึ่งไม่แสดงเลยและสัญญาณ ST ซึ่งเชื่อมต่อกับสายสามัญซึ่งสอดคล้องกับระดับศูนย์ตรรกะ
เมื่อเปิดสวิตช์ตัวนับจะไม่หยุดดังที่แสดงในรูปที่ 6 สัญญาณ END และ Q1 จะวนเป็นรอบโดยไม่หยุดดำเนินการต่อ รูปร่างของสัญญาณเหล่านี้จะเป็นคดเคี้ยวคลาสสิก ดังนั้นจึงกลายเป็นเพียงเครื่องกำเนิดไฟฟ้าของพัลส์รูปสี่เหลี่ยมผืนผ้าความถี่ที่สามารถควบคุมได้โดยตัวต้านทานผันแปร R2 และสามารถตั้งค่าตัวแบ่งส่วนนับตามตารางที่แสดงในรูปที่ 7
พัลส์อย่างต่อเนื่องจากเอาต์พุตของ Q1 ไปที่อินพุตนับของตัวนับทศนิยม - ตัวถอดรหัส DD2 K561IE8 โซ่ R4C5 เมื่อเปิดเครื่องจะรีเซ็ตตัวนับเป็นศูนย์ เป็นผลให้ระดับสูงปรากฏขึ้นที่เอาต์พุตของตัวถอดรหัส“ 0” (พิน 3) ที่เอาต์พุต 1 ... 9 ระดับต่ำ ด้วยการมาถึงของพัลส์นับครั้งแรกระดับสูงจะย้ายไปที่เอาต์พุต "1" พัลส์ที่สองตั้งค่าระดับสูงที่เอาต์พุต "2" และต่อไปจนถึงเอาต์พุต "9" จากนั้นตัวนับล้นและรอบการนับเริ่มต้นใหม่อีกครั้ง
สัญญาณควบคุมที่เกิดขึ้นผ่านสวิตช์ SA1 สามารถป้อนไปยังเครื่องกำเนิดเสียงในองค์ประกอบ DD3.1 ... 4 หรือไปยังแอมพลิฟายเออร์รีเลย์ VT2 ระยะเวลาที่ล่าช้าขึ้นอยู่กับตำแหน่งของสวิตช์ SA1 ด้วยการเชื่อมต่อเทอร์มินัล M01 ... M05 ที่ระบุไว้ในไดอะแกรมและพารามิเตอร์ของห่วงโซ่การกำหนดเวลา R2C2 เป็นไปได้ที่จะได้รับความล่าช้าเวลาตั้งแต่ 30 วินาทีถึง 9 ชั่วโมง
Boris Aladyshkin
ดูได้ที่ e.imadeself.com
: