ประเภท: บทความเด่น » อิเล็กทรอนิคส์ในทางปฏิบัติ
จำนวนการดู: 368329
ความเห็นเกี่ยวกับบทความ: 5
แบบแผนการแปลงความถี่มือสมัครเล่น
 หนึ่งในวงจรอินเวอร์เตอร์แรกสำหรับการจ่ายไฟมอเตอร์สามเฟสได้รับการตีพิมพ์ในนิตยสารวิทยุฉบับที่ 11 ของปี 1999 นักพัฒนาโครงการ M. Mukhin ในเวลานั้นเป็นนักเรียนเกรด 10 และมีส่วนร่วมในวงวิทยุ
หนึ่งในวงจรอินเวอร์เตอร์แรกสำหรับการจ่ายไฟมอเตอร์สามเฟสได้รับการตีพิมพ์ในนิตยสารวิทยุฉบับที่ 11 ของปี 1999 นักพัฒนาโครงการ M. Mukhin ในเวลานั้นเป็นนักเรียนเกรด 10 และมีส่วนร่วมในวงวิทยุ
เครื่องแปลงไฟนี้มีจุดประสงค์เพื่อขับเคลื่อนมอเตอร์ขนาดเล็กสามเฟส DID-5TA ซึ่งใช้ในเครื่องสำหรับการเจาะแผงวงจรพิมพ์ ควรสังเกตว่าความถี่ในการทำงานของเครื่องยนต์นี้คือ 400Hz และแรงดันไฟฟ้าคือ 27V นอกจากนี้จุดกึ่งกลางของมอเตอร์ (เมื่อเชื่อมต่อกับขดลวดด้วย "ดาว") ถูกนำออกมาซึ่งทำให้มันเป็นไปได้ที่จะทำให้วงจรง่ายขึ้นมาก: ใช้สัญญาณเอาต์พุตเพียงสามตัวเท่านั้นและแต่ละเฟสต้องใช้เอาต์พุตคีย์เพียงปุ่มเดียว วงจรเครื่องกำเนิดไฟฟ้าแสดงในรูปที่ 1
ดังที่เห็นได้จากแผนภาพตัวแปลงประกอบด้วยสามส่วนคือเครื่องกำเนิดไฟฟ้าแบบพัลส์ลำดับสามเฟสบน DD1 ... วงจรไมโคร DD3, สามปุ่มบนทรานซิสเตอร์ประกอบ (VT1 ... VT6) และมอเตอร์ไฟฟ้า M1 ที่แท้จริง
รูปที่ 2 แสดงแผนภาพเวลาของพัลส์ที่สร้างโดยเครื่องกำเนิดไฟฟ้า ต้นแบบออสซิลเลเตอร์ทำบนชิป DD1 การใช้ตัวต้านทาน R2 คุณสามารถตั้งค่าความเร็วรอบเครื่องยนต์ที่ต้องการรวมถึงเปลี่ยนได้ภายในขีด จำกัด ที่แน่นอน ข้อมูลรายละเอียดเพิ่มเติมเกี่ยวกับวงจรสามารถพบได้ในบันทึกด้านบน มันควรจะตั้งข้อสังเกตว่าตามคำศัพท์ที่ทันสมัยกำเนิดดังกล่าวเรียกว่าตัวควบคุม

รูปที่ 1
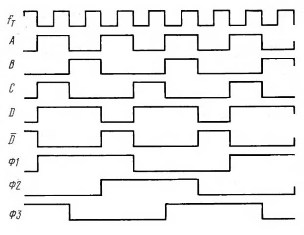
รูปที่ 2 ไดอะแกรมกำหนดเวลาของพัลส์ของเครื่องกำเนิดไฟฟ้า
ตามตัวควบคุม A. Dubrovsky จากเมือง Novopolotsk ภูมิภาค Vitebsk การออกแบบไดรฟ์ความถี่ตัวแปรสำหรับเครื่องยนต์ที่ขับเคลื่อนโดย 220V AC ได้รับการพัฒนา แผนภาพวงจรถูกตีพิมพ์ในวารสาร Radio 2001 หมายเลข 4
ในรูปแบบนี้ไม่มีการเปลี่ยนแปลงในทางปฏิบัติตัวควบคุมที่เพิ่งตรวจสอบจะถูกใช้ตามรูปแบบของ M. Mukhin สัญญาณเอาต์พุตจากองค์ประกอบ DD3.2, DD3.3 และ DD3.4 ถูกใช้เพื่อควบคุมคีย์เอาต์พุต A1, A2 และ A3 ซึ่งเชื่อมต่อกับมอเตอร์ไฟฟ้า แผนภาพแสดงรหัส A1 ส่วนที่เหลือเหมือนกัน แผนภาพที่สมบูรณ์ของอุปกรณ์แสดงในรูปที่ 3

รูปที่ 3
การเชื่อมต่อมอเตอร์กับเอาท์พุทของอินเวอร์เตอร์สามเฟส
เพื่อทำความคุ้นเคยกับการเชื่อมต่อของเครื่องยนต์กับปุ่มเอาท์พุทมันเป็นสิ่งที่ควรพิจารณาเมื่อใช้ไดอะแกรมแบบง่ายที่แสดงในรูปที่ 4

รูปที่ 4
รูปแสดงมอเตอร์ M ควบคุมโดยแป้น V1 ... V6 องค์ประกอบเซมิคอนดักเตอร์เพื่อลดความซับซ้อนของวงจรที่แสดงในรูปแบบของการสัมผัสทางกล มอเตอร์ไฟฟ้าขับเคลื่อนด้วยแรงดันคงที่ Ud ที่ได้รับจากเครื่องปรับกระแสไฟฟ้า (ไม่แสดงในรูป) ในกรณีนี้ปุ่ม V1, V3, V5 จะเรียกว่าส่วนบนและปุ่ม V2, V4, V6 จะต่ำกว่า
เห็นได้ชัดว่าการเปิดตัวของปุ่มบนและล่างในเวลาเดียวกันคือคู่กับ V1 & V6, V3 & V6, V5 & V2 นั้นไม่สามารถยอมรับได้อย่างสมบูรณ์: เกิดไฟฟ้าลัดวงจร ดังนั้นสำหรับการดำเนินการตามปกติของชุดรูปแบบคีย์ดังกล่าวมีความจำเป็นที่เมื่อเปิดคีย์ล่างแล้วคีย์บนจึงถูกปิดไปแล้ว ด้วยเหตุนี้ตัวควบคุมในรูปแบบหยุดชั่วคราวมักจะเรียกว่า "โซนตาย"
ขนาดของการหยุดชั่วคราวนี้เป็นเช่นเพื่อรับประกันการปิดทรานซิสเตอร์พลังงาน หากการหยุดชั่วคราวไม่เพียงพออาจเป็นไปได้ที่จะเปิดปุ่มบนและล่างในเวลาเดียวกัน สิ่งนี้ทำให้ทรานซิสเตอร์เอาต์พุตเกิดความร้อนซึ่งมักนำไปสู่ความล้มเหลว สถานการณ์นี้เรียกว่าผ่านกระแส
ให้เรากลับไปที่วงจรที่แสดงในรูปที่ 3 ในกรณีนี้สวิตช์บนคือทรานซิสเตอร์ 1VT3 และสวิตช์ล่าง 1VT6 มันง่ายที่จะเห็นว่าปุ่มด้านล่างเชื่อมต่ออย่างแรงด้วยอุปกรณ์ควบคุมและระหว่างกันดังนั้นสัญญาณควบคุมจากเอาต์พุต 3 ขององค์ประกอบ DD3.2 ผ่านตัวต้านทาน 1R1 และ 1R3 จะถูกป้อนโดยตรงไปยังฐานของทรานซิสเตอร์คอมโพสิต 1VT4 ... 1VT5 ทรานซิสเตอร์แบบคอมโพสิตนี้ไม่มีอะไรนอกจากไดรเวอร์ตัวหลัก นอกจากนี้ยังมีองค์ประกอบจาก DD3, DD4, ทรานซิสเตอร์ประกอบของตัวขับคีย์ล่างของแชนเนล A2 และ A3 ทั้งสามช่องใช้พลังงานจากเครื่องเรียงกระแสเดียวกัน บนสะพานไดโอด VD2
ปุ่มบนของการสื่อสารแบบกัลวานิกกับสายลวดและอุปกรณ์ควบคุมทั่วไปไม่มีดังนั้นในการควบคุมนอกเหนือไปจากไดรเวอร์บนคอมโพสิตทรานซิสเตอร์ 1VT1 ... 1VT2 จะต้องติดตั้ง optocoupler เพิ่มเติม 1U1 ในแต่ละช่องสัญญาณ เอาท์พุท optocoupler ทรานซิสเตอร์ในวงจรนี้ยังทำหน้าที่ของอินเวอร์เตอร์เพิ่มเติม: เมื่อเอาท์พุท 3 ขององค์ประกอบ DD3.2 อยู่ในระดับสูงทรานซิสเตอร์ของสวิตช์บน 1VT3 จะเปิดขึ้น
วงจรเรียงกระแสแยก 1VD1, 1C1 ใช้สำหรับจ่ายไฟให้กับไดรเวอร์สำหรับคีย์หลักแต่ละตัว วงจรเรียงกระแสแต่ละอันขับเคลื่อนด้วยขดลวดหม้อแปลงแต่ละอันซึ่งถือได้ว่าเป็นข้อเสียเปรียบของวงจร
ตัวเก็บประจุ 1C2 มีการหน่วงเวลาการสลับที่สำคัญประมาณ 100 ไมโครวินาที optocoupler 1U1 ให้ปริมาณที่เท่ากันดังนั้นจึงสร้าง "โซนตาย" ดังกล่าว
การควบคุมความถี่เพียงพอหรือไม่
ด้วยการลดความถี่ของการจ่ายแรงดันไฟฟ้ากระแสสลับทำให้ความต้านทานเหนี่ยวนำของขดลวดมอเตอร์ลดลง (เพียงจำสูตรต้านทานการเหนี่ยวนำ) ซึ่งนำไปสู่การเพิ่มขึ้นของกระแสผ่านขดลวดและเป็นผลให้ความร้อนสูงเกินไปของขดลวด นอกจากนี้วงจรแม่เหล็กสเตเตอร์ก็อิ่มตัว เพื่อหลีกเลี่ยงผลกระทบด้านลบเหล่านี้เมื่อความถี่ลดลงจะต้องลดค่าประสิทธิภาพของแรงดันไฟฟ้าในขดลวดมอเตอร์
วิธีหนึ่งในการแก้ปัญหาใน chastotniks มือสมัครเล่นถูกเสนอเพื่อควบคุมค่าที่มีประสิทธิภาพมากที่สุดนี้ด้วยความช่วยเหลือของ LATR การติดต่อแบบเคลื่อนย้ายได้ซึ่งมีการเชื่อมต่อทางกลกับตัวต้านทานตัวแปรของตัวควบคุมความถี่ แนะนำให้ใช้วิธีนี้ในบทความโดย S. Kalugin“ ขั้นตอนสุดท้ายของการควบคุมความเร็วของมอเตอร์แบบอะซิงโครนัสสามเฟส” วารสารวิทยุ 2545 ฉบับที่ 3 หน้า 31
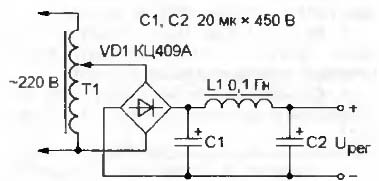
ในสภาพมือสมัครเล่นการประกอบเครื่องจักรกลมีความซับซ้อนและที่สำคัญที่สุดคือไม่น่าเชื่อถือ วิธีที่ง่ายและน่าเชื่อถือมากขึ้นในการใช้เครื่องเปลี่ยนรูปแบบอัตโนมัติถูกเสนอโดย E. Muradkhanian จากเยเรวานในนิตยสารวิทยุหมายเลข 12 2004 แผนภาพของอุปกรณ์นี้แสดงในรูปที่ 5 และ 6
แรงดันไฟหลักของ 220V ถูกส่งไปยังเครื่องเปลี่ยนรูปแบบอัตโนมัติ T1 และจากการสัมผัสที่สามารถเคลื่อนย้ายไปยังสะพาน rectifier VD1 ด้วยตัวกรอง C1, L1, C2 ที่เอาต์พุตของตัวกรองจะได้รับแรงดันไฟฟ้าคงที่ตัวแปร Ureg ซึ่งใช้ในการจ่ายกำลังมอเตอร์เอง
รูปที่ 5
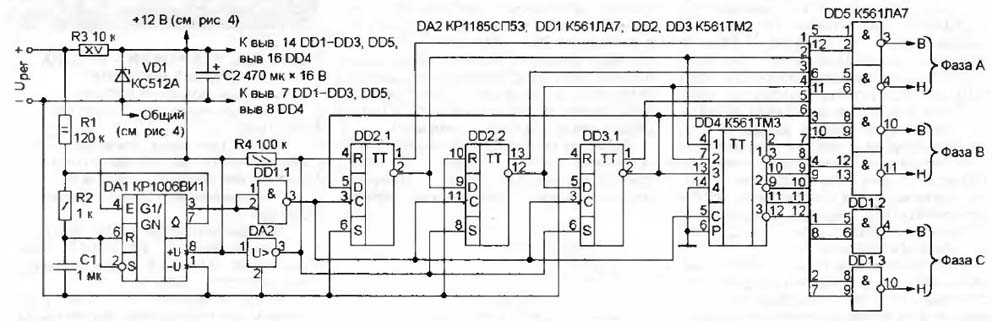
แรงดันไฟฟ้าของ Ureg ผ่านตัวต้านทาน R1 จะถูกส่งไปยังตัวกำเนิดสัญญาณต้นแบบ DA1 ซึ่งทำบนชิป KR1006VI1 NE555) จากการเชื่อมต่อนี้เครื่องกำเนิดคลื่นสี่เหลี่ยมธรรมดาจะเปลี่ยนเป็น VCO (เครื่องกำเนิดไฟฟ้าที่ควบคุมด้วยแรงดันไฟฟ้า) ดังนั้นด้วยการเพิ่มขึ้นของแรงดันไฟฟ้า Ureg ความถี่ของเครื่องกำเนิดไฟฟ้า DA1 ก็เพิ่มขึ้นซึ่งนำไปสู่การเพิ่มความเร็วของเครื่องยนต์ ด้วยแรงดันไฟฟ้าที่ลดลง Ureg ความถี่ของออสซิลเลเตอร์หลักก็จะลดลงตามสัดส่วนซึ่งจะช่วยลดความร้อนของขดลวดและความอิ่มตัวของวงจรแม่เหล็กสเตเตอร์
รูปที่ 6
ในบทความวารสารเดียวกันผู้เขียนเสนอตัวแปรของ oscillator หลักซึ่งช่วยให้คุณสามารถกำจัดการใช้เครื่องเปลี่ยนรูปแบบอัตโนมัติ วงจรเครื่องกำเนิดไฟฟ้าแสดงในรูปที่ 7

รูปที่ 7
เครื่องกำเนิดไฟฟ้าทำบนทริกเกอร์ที่สองของชิป DD3 ในแผนภาพจะถูกกำหนดเป็น DD3.2 ความถี่ถูกกำหนดโดยตัวเก็บประจุ C1, ความถี่ถูกควบคุมโดยตัวต้านทานตัวแปร R2 ร่วมกับการควบคุมความถี่, ช่วงเวลาพัลส์ที่เอาต์พุตของเครื่องกำเนิดไฟฟ้าก็เปลี่ยนไปเช่นกัน: เมื่อความถี่ลดลง, ระยะเวลาจะลดลง, ดังนั้นแรงดันไฟฟ้าของขดลวดมอเตอร์จึงลดลง หลักการควบคุมนี้เรียกว่าการปรับความกว้างพัลส์ (PWM)
ในวงจรมือสมัครเล่นภายใต้การพิจารณากำลังเครื่องยนต์มีขนาดเล็กเครื่องยนต์ขับเคลื่อนด้วยพัลส์รูปสี่เหลี่ยมผืนผ้าดังนั้น PWM จึงค่อนข้างดั้งเดิม ในความเป็นจริง เครื่องแปลงความถี่อุตสาหกรรม พลังงานสูง PWM ถูกออกแบบมาเพื่อสร้างแรงดันไฟฟ้าไซน์เกือบที่เอาต์พุตดังที่แสดงในรูปที่ 8 และใช้งานกับโหลดต่างๆ: ที่แรงบิดคงที่พลังงานคงที่และโหลดพัดลม

รูปที่ 8 รูปร่างของแรงดันไฟฟ้าขาออกของหนึ่งเฟสของอินเวอร์เตอร์สามเฟสด้วย PWM
ส่วนพลังงานของวงจร
chastotniks แบรนด์ที่ทันสมัยมีผลลัพธ์ ทรานซิสเตอร์พลังงาน MOSFET หรือ IGBTออกแบบมาเป็นพิเศษสำหรับการทำงานในเครื่องแปลงความถี่ ในบางกรณีทรานซิสเตอร์เหล่านี้จะรวมกันเป็นโมดูลซึ่งโดยทั่วไปจะช่วยปรับปรุงประสิทธิภาพของโครงสร้างทั้งหมด ทรานซิสเตอร์เหล่านี้ถูกควบคุมโดยใช้ไมโครคอนโทรลเลอร์แบบพิเศษ ในบางรุ่นจะมีไดรเวอร์รวมอยู่ในโมดูลทรานซิสเตอร์
ปัจจุบันชิปและทรานซิสเตอร์ที่พบมากที่สุดคือ International Rectifier ในโครงร่างที่อธิบายไว้ค่อนข้างเป็นไปได้ที่จะใช้ไดรเวอร์ IR2130 หรือ IR2132 ในกรณีหนึ่งของชิปดังกล่าวจะมีไดรเวอร์หกตัวพร้อมกัน: สามตัวสำหรับปุ่มล่างและสามตัวสำหรับด้านบนซึ่งทำให้ง่ายต่อการประกอบสเตจเอาท์พุทบริดจ์แบบสามเฟส นอกเหนือจากฟังก์ชั่นหลักแล้วไดรเวอร์เหล่านี้ยังมีคุณสมบัติเพิ่มเติมหลายอย่างเช่นการป้องกันโอเวอร์โหลดและการลัดวงจร ข้อมูลรายละเอียดเพิ่มเติมเกี่ยวกับไดรเวอร์เหล่านี้สามารถพบได้ในคำอธิบายทางเทคนิคของแผ่นข้อมูลสำหรับชิปที่เกี่ยวข้อง
ด้วยข้อดีทั้งหมดข้อเสียเปรียบเพียงอย่างเดียวของ microcircuits เหล่านี้คือราคาสูงดังนั้นผู้ออกแบบจึงมีความแตกต่างง่ายกว่าราคาถูกกว่าและในเวลาเดียวกันวิธีที่สามารถใช้งานได้: microcircuits ไดร์เวอร์พิเศษถูกแทนที่ด้วยชิปจับเวลา
คีย์เอาต์พุตบนตัวจับเวลารวม
หากเรากลับไปที่รูปที่ 6 เราจะเห็นว่าวงจรมีสัญญาณเอาต์พุตสำหรับแต่ละสามเฟสที่กำหนดเป็น "H" และ "B" การมีสัญญาณเหล่านี้ช่วยให้สามารถควบคุมปุ่มบนและล่างแยกกันได้ การแยกนี้ช่วยให้คุณสร้างการหยุดชั่วคราวระหว่างการสลับของปุ่มบนและล่างโดยใช้ชุดควบคุมแทนที่จะเป็นปุ่มตัวเองดังที่แสดงในแผนภาพในรูปที่ 3
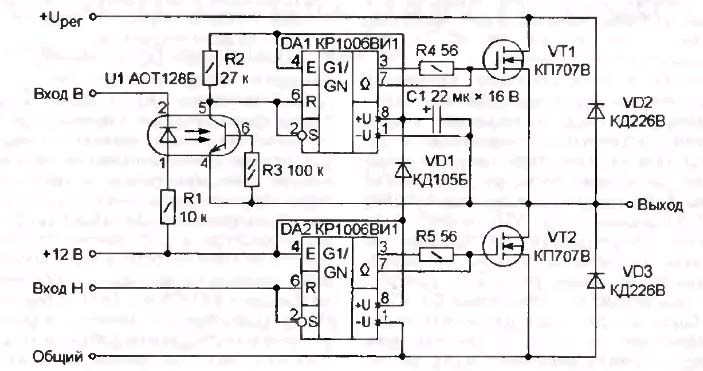
เลย์เอาต์ของคีย์เอาต์พุตโดยใช้ไมโครเซอร์กิต KR1006VI1 (NE555) แสดงในรูปที่ 9 โดยธรรมชาติสำหรับตัวแปลงสามเฟสจะต้องใช้คีย์ดังกล่าวสามชุด
รูปที่ 9
เนื่องจากไดรเวอร์ของปุ่มบน (VT1) และปุ่มล่าง (VT2) ใช้วงจรไมโคร KR1006VI1 ซึ่งรวมอยู่ในรูปแบบของชมิดท์ชมิดท์ ด้วยความช่วยเหลือของพวกเขาเป็นไปได้ที่จะได้รับกระแสพัลส์เกตที่อย่างน้อย 200 mA ซึ่งทำให้สามารถได้รับการควบคุมทรานซิสเตอร์ที่เชื่อถือได้และรวดเร็วเพียงพอ
ชิปของปุ่มล่าง DA2 มีการสื่อสารแบบกัลวานิกกับแหล่งจ่ายไฟ + 12V และด้วยชุดควบคุมดังนั้นจึงใช้พลังงานจากแหล่งนี้ ไมโครชิปของปุ่มบนสามารถขับเคลื่อนในลักษณะเดียวกับที่แสดงในรูปที่ 3 โดยใช้วงจรเรียงกระแสเพิ่มเติมและขดลวดแยกบนหม้อแปลง แต่ในโครงการนี้มีการใช้วิธีการทางโภชนาการที่แตกต่างกันที่เรียกว่า "เร็ว" ซึ่งมีความหมายดังนี้ DA1 microcircuit รับพลังงานจากตัวเก็บประจุอิเล็กโทรไลต์ C1 ซึ่งประจุเกิดขึ้นผ่านวงจร: + 12V, VD1, C1, ทรานซิสเตอร์เปิด VT2 (ผ่านขั้วไฟฟ้าที่ท่อระบายน้ำเป็นแหล่งกำเนิด)“ ธรรมดา”
กล่าวอีกนัยหนึ่งประจุของตัวเก็บประจุ C1 จะเกิดขึ้นในขณะที่ทรานซิสเตอร์ตัวล่างเปิด ในขณะนี้เทอร์มินัลลบของตัวเก็บประจุ C1 เกือบจะลัดวงจรไปยังสายสามัญ (ความต้านทานของท่อระบายน้ำเปิด - ส่วนแหล่งที่มาของทรานซิสเตอร์ภาคสนามที่ทรงพลังคือหนึ่งในพันของโอห์ม!) ซึ่งทำให้สามารถชาร์จได้
เมื่อปิดทรานซิสเตอร์ VT2 แล้วไดโอด VD1 ก็จะปิดประจุของตัวเก็บประจุ C1 จะหยุดจนกว่าจะเปิดทรานซิสเตอร์ VT2 ครั้งถัดไปแต่ประจุของตัวเก็บประจุ C1 ก็เพียงพอที่จะจ่ายพลังงานให้กับชิป DA1 ในขณะที่ทรานซิสเตอร์ VT2 ถูกปิด ตามธรรมชาติในขณะนี้ทรานซิสเตอร์ของปุ่มบนอยู่ในสถานะปิด ชุดรูปแบบของปุ่มเปิดใช้งานนี้ดีพอที่จะนำไปใช้โดยไม่มีการเปลี่ยนแปลงในการออกแบบมือสมัครเล่นอื่น ๆ
บทความนี้กล่าวถึงโครงร่างที่เรียบง่ายที่สุดของอินเวอร์เตอร์สามเฟสแบบสมัครเล่นในวงจรขนาดเล็กและขนาดกลางของการรวมเข้าด้วยกันซึ่งทุกอย่างเริ่มต้นขึ้นและคุณยังสามารถพิจารณาทุกสิ่งจากภายในโดยใช้วงจร การออกแบบที่ทันสมัยมากขึ้นจะทำ การใช้ไมโครคอนโทรลเลอร์ส่วนใหญ่มักเป็น PIC ซีรีย์รูปแบบที่ได้รับการตีพิมพ์ซ้ำแล้วซ้ำอีกในนิตยสารวิทยุ
ชุดควบคุมไมโครคอนโทรลเลอร์ตามรูปแบบนั้นง่ายกว่าในวงจรรวมระดับปานกลางในการรวมพวกมันมีฟังก์ชั่นที่จำเป็นเช่น สตาร์ทเครื่องยนต์อย่างราบรื่นการป้องกันโอเวอร์โหลดและไฟฟ้าลัดวงจรและอื่น ๆ ในบล็อกเหล่านี้ทุกอย่างจะถูกนำไปใช้โดยมีค่าใช้จ่ายของโปรแกรมควบคุมหรือที่เรียกว่า "เฟิร์มแวร์" หน่วยควบคุมของอินเวอร์เตอร์สามเฟสจะขึ้นอยู่กับโปรแกรมเหล่านี้อย่างแม่นยำ
วงจรที่เรียบง่ายพอสมควรสำหรับตัวควบคุมอินเวอร์เตอร์สามเฟสมีการเผยแพร่ในวารสาร Radio 2008 หมายเลข 12 บทความนี้มีชื่อว่า "ผู้ชำนาญการออสซิลเลเตอร์สำหรับเครื่องแปลงกระแสไฟฟ้าสามเฟส" ผู้เขียนบทความนี้ยังเป็นผู้เขียนบทความเกี่ยวกับไมโครคอนโทรลเลอร์และการออกแบบอื่น ๆ อีกมากมาย บทความนี้นำเสนอสองวงจรง่าย ๆ บนไมโครคอนโทรลเลอร์ PIC12F629 และ PIC16F628
ความถี่ของการหมุนในทั้งสองรูปแบบมีการเปลี่ยนแปลงแบบขั้นตอนด้วยความช่วยเหลือของสวิทช์เสาเดียวซึ่งค่อนข้างเพียงพอในหลายกรณีการปฏิบัติ นอกจากนี้ยังมีลิงค์ที่คุณสามารถดาวน์โหลด "เฟิร์มแวร์" สำเร็จรูปและยิ่งไปกว่านั้นโปรแกรมพิเศษที่คุณสามารถเปลี่ยนพารามิเตอร์ของ "เฟิร์มแวร์" ตามดุลยพินิจของคุณ นอกจากนี้ยังเป็นไปได้การทำงานของโหมดเครื่องกำเนิดไฟฟ้า "สาธิต" ในโหมดนี้ความถี่ของเครื่องกำเนิดไฟฟ้าจะลดลง 32 เท่าซึ่งจะช่วยให้สามารถมองเห็นการใช้งานของเครื่องกำเนิดไฟฟ้าได้ นอกจากนี้ยังมีคำแนะนำสำหรับการเชื่อมต่อหน่วยพลังงาน
แต่ถ้าคุณไม่ต้องการมีส่วนร่วมในการเขียนโปรแกรมไมโครคอนโทรลเลอร์โมโตโรล่าได้เปิดตัวคอนโทรลเลอร์อัจฉริยะพิเศษ MC3PHAC ออกแบบมาสำหรับระบบควบคุมมอเตอร์ 3 เฟส บนพื้นฐานของความเป็นไปได้ในการสร้างระบบที่ราคาไม่แพงของไดรฟ์สามเฟสแบบปรับได้ที่มีฟังก์ชั่นที่จำเป็นทั้งหมดสำหรับการควบคุมและป้องกัน ไมโครคอนโทรลเลอร์นั้นใช้กันอย่างแพร่หลายในเครื่องใช้ในครัวเรือนต่างๆเช่นในเครื่องล้างจานหรือตู้เย็น
สมบูรณ์ด้วยตัวควบคุม MC3PHAC ที่เป็นไปได้ที่จะใช้โมดูลพลังงานแบบปิดเช่นชั้นวาง IRAMS10UP60A ที่พัฒนาโดย International Rectifier โมดูลประกอบด้วยสวิตช์ไฟหกตัวและวงจรควบคุม สำหรับรายละเอียดเพิ่มเติมเกี่ยวกับองค์ประกอบเหล่านี้ดูเอกสารข้อมูลของพวกเขาซึ่งหาได้ง่ายบนอินเทอร์เน็ต
Boris Aladyshkin
ดูได้ที่ e.imadeself.com
: