Catégories: Articles en vedette » Électronique pratique
Nombre de fois vus: 368329
Commentaires sur l'article: 5
Schémas des convertisseurs de fréquence amateurs
 L'un des premiers circuits onduleurs pour alimenter un moteur triphasé a été publié dans le magazine Radio n ° 11 de 1999. Le développeur du programme, M. Mukhin, était alors un élève de 10e année et était engagé dans un cercle radio.
L'un des premiers circuits onduleurs pour alimenter un moteur triphasé a été publié dans le magazine Radio n ° 11 de 1999. Le développeur du programme, M. Mukhin, était alors un élève de 10e année et était engagé dans un cercle radio.
Le convertisseur était destiné à alimenter le moteur triphasé miniature DID-5TA, qui était utilisé dans la machine pour percer des cartes de circuits imprimés. Il convient de noter que la fréquence de fonctionnement de ce moteur est de 400 Hz et la tension d'alimentation est de 27 V. De plus, le point médian du moteur (lors de la connexion des enroulements avec une «étoile») a été mis en évidence, ce qui a permis de simplifier extrêmement le circuit: il n'a fallu que trois signaux de sortie, et chaque phase ne nécessitait qu'une seule clé de sortie. Le circuit du générateur est illustré à la figure 1.
Comme vous pouvez le voir sur le schéma, le convertisseur se compose de trois parties: un générateur-générateur d'impulsions à séquence triphasée sur microcircuits DD1 ... DD3, trois touches sur des transistors composites (VT1 ... VT6) et le moteur électrique M1 lui-même.
La figure 2 montre les chronogrammes des impulsions générées par le générateur générateur. L'oscillateur maître est fabriqué sur la puce DD1. En utilisant la résistance R2, vous pouvez régler le régime moteur souhaité, ainsi que le modifier dans certaines limites. Des informations plus détaillées sur le circuit peuvent être trouvées dans le journal ci-dessus. Il convient de noter que, selon la terminologie moderne, ces générateurs sont appelés contrôleurs.

Figure 1
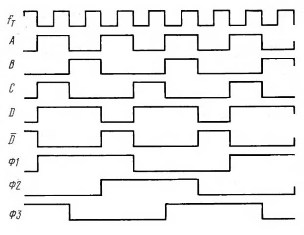
Figure 2. Diagrammes temporels des impulsions du générateur.
D'après le contrôleur A. Dubrovsky de la ville de Novopolotsk, région de Vitebsk. La conception d'un variateur de fréquence pour un moteur alimenté en 220V AC a été développée. Le schéma du circuit a été publié dans la revue Radio 2001. Numéro 4.
Dans ce schéma, pratiquement inchangé, le contrôleur qui vient d'être examiné est utilisé selon le schéma de M. Mukhin. Les signaux de sortie des éléments DD3.2, DD3.3 et DD3.4 sont utilisés pour contrôler les touches de sortie A1, A2 et A3, auxquelles le moteur électrique est connecté. Le schéma montre la clé A1, les autres sont identiques. Un schéma complet de l'appareil est illustré à la figure 3.

Figure 3
Connexion du moteur à la sortie d'un onduleur triphasé
Pour vous familiariser avec la connexion du moteur aux touches de sortie, il convient de considérer un schéma simplifié illustré à la figure 4.

Figure 4
La figure montre le moteur M, commandé par les touches V1 ... V6. Eléments semi-conducteurs pour simplifier le circuit représenté sous forme de contacts mécaniques. Le moteur électrique est alimenté par une tension constante Ud obtenue du redresseur (non représentée sur la figure). Dans ce cas, les touches V1, V3, V5 sont appelées supérieures et les touches V2, V4, V6 inférieures.
Il est bien évident que l'ouverture des touches supérieure et inférieure en même temps, à savoir avec les paires V1 & V6, V3 & V6, V5 & V2, est totalement inacceptable: un court-circuit se produira. Par conséquent, pour le fonctionnement normal d'un tel schéma de clés, il est impératif qu'au moment où la clé inférieure est ouverte, la clé supérieure ait déjà été fermée. À cette fin, les contrôleurs forment une pause, souvent appelée «zone morte».
L'ampleur de cette pause est de nature à assurer la fermeture garantie des transistors de puissance. Si cette pause est insuffisante, il est possible d'ouvrir brièvement simultanément les touches supérieure et inférieure. Cela fait chauffer les transistors de sortie, ce qui conduit souvent à leur défaillance. Cette situation est appelée par les courants.
Revenons au circuit représenté sur la figure 3. Dans ce cas, les interrupteurs supérieurs sont des transistors 1VT3, et les inférieurs 1VT6. Il est facile de voir que les touches inférieures sont connectées galvaniquement au dispositif de commande et entre elles.Par conséquent, le signal de commande de la sortie 3 de l'élément DD3.2 à travers les résistances 1R1 et 1R3 est envoyé directement à la base du transistor composite 1VT4 ... 1VT5. Ce transistor composite n'est rien d'autre qu'un pilote de clé inférieur. Exactement également à partir des éléments DD3, DD4, les transistors composites du pilote de clé inférieur des canaux A2 et A3 sont contrôlés. Les trois canaux sont alimentés par le même redresseur. sur le pont de diodes VD2.
Les touches supérieures de communication galvanique avec un fil commun et un dispositif de commande n'ont donc pas à les contrôler, en plus du driver, sur un transistor composite 1VT1 ... 1VT2, un optocoupleur supplémentaire 1U1 a dû être installé dans chaque canal. Le transistor optocoupleur de sortie de ce circuit remplit également la fonction d'un inverseur supplémentaire: lorsque la sortie 3 de l'élément DD3.2 est à un niveau haut, le transistor de l'interrupteur supérieur 1VT3 est ouvert.
Un redresseur séparé 1VD1, 1C1 est utilisé pour alimenter chaque pilote de touche supérieure. Chaque redresseur est alimenté par un enroulement de transformateur individuel, qui peut être considéré comme un inconvénient du circuit.
Le condensateur 1C2 fournit un retard de commutation clé d'environ 100 microsecondes, l'optocoupleur 1U1 donne la même quantité, formant ainsi la "zone morte" susmentionnée.
La régulation de fréquence est-elle suffisante?
Avec une diminution de la fréquence de la tension alternative d'alimentation, la résistance inductive des enroulements du moteur chute (rappelez-vous simplement la formule de résistance inductive), ce qui conduit à une augmentation du courant à travers les enroulements et, par conséquent, à une surchauffe des enroulements. De plus, le circuit magnétique du stator est saturé. Pour éviter ces conséquences négatives, lorsque la fréquence diminue, la valeur effective de la tension sur les enroulements du moteur doit également être réduite.
Une façon de résoudre le problème des chastotniks amateurs a été proposée pour réguler cette valeur la plus efficace à l'aide du LATR, dont le contact mobile avait une connexion mécanique avec une résistance variable du régulateur de fréquence. Cette méthode a été recommandée dans l'article de S. Kalugin, «Finalisation du régulateur de vitesse des moteurs asynchrones triphasés». Journal of Radio 2002, n ° 3, p. 31.
Dans des conditions amateurs, l'assemblage mécanique s'est avéré complexe et, surtout, peu fiable. Un moyen plus simple et plus fiable d'utiliser un autotransformateur a été proposé par E. Muradkhanian d'Erevan dans le magazine Radio n ° 12 2004. Un schéma de cet appareil est illustré sur les figures 5 et 6.
La tension secteur de 220V est fournie à l'autotransformateur T1, et de son contact mobile au pont redresseur VD1 avec un filtre C1, L1, C2. A la sortie du filtre, une tension constante variable Ureg est obtenue, qui est utilisée pour alimenter le moteur lui-même.
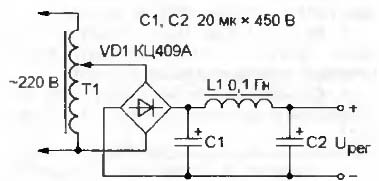
Figure 5
La tension Ureg à travers la résistance R1 est également fournie à l'oscillateur maître DA1, réalisé sur la puce KR1006VI1 (version importée NE555) Grâce à cette connexion, un générateur à onde carrée classique se transforme en VCO (générateur commandé en tension). Par conséquent, avec une augmentation de la tension Ureg, la fréquence du générateur DA1 augmente également, ce qui entraîne une augmentation du régime moteur. Avec une diminution de la tension Ureg, la fréquence de l'oscillateur maître diminue également proportionnellement, ce qui évite la surchauffe des enroulements et la sursaturation du circuit magnétique du stator.
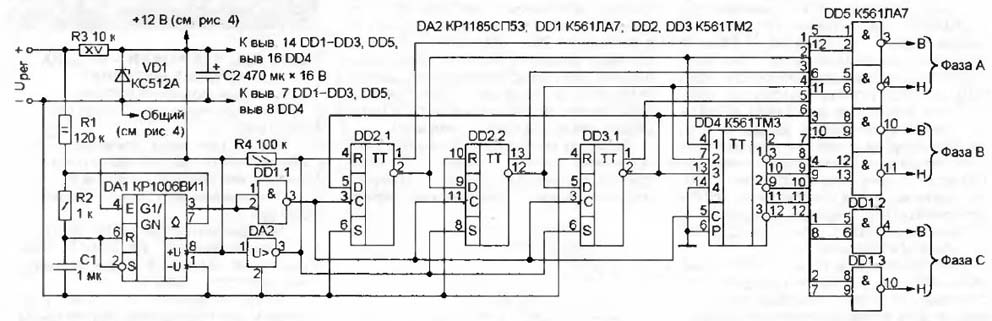
Figure 6
Dans le même article de revue, l'auteur propose une variante de l'oscillateur maître, qui vous permet de vous débarrasser de l'utilisation d'un autotransformateur. Le circuit du générateur est illustré à la figure 7.

Figure 7
Le générateur est fabriqué sur le deuxième déclencheur de la puce DD3, dans le diagramme, il est désigné comme DD3.2. La fréquence est fixée par le condensateur C1, la fréquence est contrôlée par une résistance variable R2. Avec le contrôle de fréquence, la durée d'impulsion à la sortie du générateur change également: lorsque la fréquence est réduite, la durée diminue, de sorte que la tension sur les enroulements du moteur diminue. Ce principe de contrôle est appelé modulation de largeur d'impulsion (PWM).
Dans le circuit amateur considéré, la puissance du moteur est faible, le moteur est alimenté par des impulsions rectangulaires, donc le PWM est assez primitif. En vrai convertisseurs de fréquence industriels Le PWM haute puissance est conçu pour générer une tension presque sinusoïdale à la sortie, comme le montre la figure 8, et pour réaliser des travaux avec différentes charges: à couple constant, à puissance constante et à charge de ventilateur.

Figure 8. La forme de la tension de sortie d'une phase d'un onduleur triphasé avec PWM.
Partie puissance du circuit
Les chastotniks de marque modernes ont une sortie Transistors de puissance MOSFET ou IGBTspécialement conçu pour fonctionner dans des convertisseurs de fréquence. Dans certains cas, ces transistors sont combinés en modules, ce qui améliore généralement les performances de l'ensemble de la structure. Ces transistors sont contrôlés à l'aide de microcircuits pilotes spécialisés. Dans certains modèles, des pilotes sont disponibles intégrés dans des modules à transistors.
Actuellement, les puces et transistors les plus courants sont International Rectifier. Dans le schéma décrit, il est tout à fait possible d'utiliser les pilotes IR2130 ou IR2132. Dans un cas d'une telle puce, il y a six pilotes à la fois: trois pour la clé inférieure et trois pour le supérieur, ce qui facilite l'assemblage d'un étage de sortie de pont triphasé. En plus de la fonction principale, ces pilotes en contiennent également plusieurs supplémentaires, par exemple une protection contre les surcharges et les courts-circuits. Des informations plus détaillées sur ces pilotes peuvent être trouvées dans les descriptions techniques de la fiche technique des puces respectives.
Avec tous les avantages, le seul inconvénient de ces microcircuits est leur prix élevé, de sorte que l'auteur de la conception est allé d'une manière différente, plus simple, moins chère et en même temps réalisable: les microcircuits de pilotes spécialisés ont été remplacés par des puces de minuterie intégrées КР1006ВИ1 (NE555).
Touches de sortie sur les minuteries intégrées
Si nous revenons à la figure 6, nous pouvons voir que le circuit a des signaux de sortie pour chacune des trois phases, désignées par «H» et «B». La présence de ces signaux permet un contrôle séparé des touches supérieure et inférieure. Cette séparation vous permet de créer une pause entre la commutation des touches supérieure et inférieure à l'aide de l'unité de commande, plutôt que les touches elles-mêmes, comme le montre le schéma de la figure 3.
Le circuit des clés de sortie utilisant les microcircuits KR1006VI1 (NE555) est illustré à la figure 9. Naturellement, pour un convertisseur triphasé, trois copies de ces clés sont nécessaires.
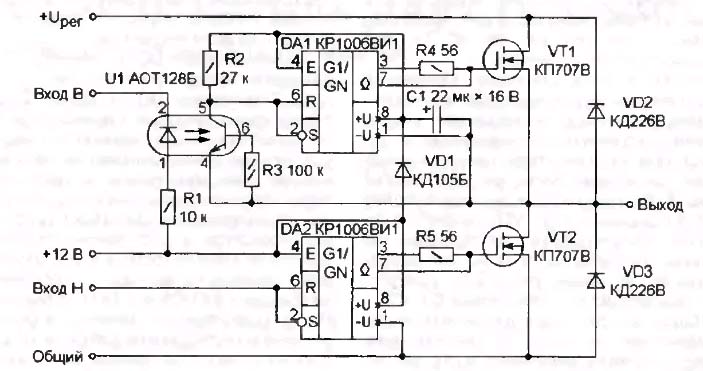
Figure 9
En tant que pilotes des touches supérieure (VT1) et inférieure (VT2), les microcircuits KR1006VI1 sont utilisés, qui sont inclus selon le schéma de déclenchement de Schmidt. Avec leur aide, il est possible d'obtenir un courant de grille d'impulsions d'au moins 200 mA, ce qui permet d'obtenir une commande suffisamment fiable et rapide des transistors de sortie.
Les puces des touches inférieures DA2 ont une connexion galvanique avec l'alimentation + 12V et, par conséquent, avec l'unité de commande, elles sont donc alimentées à partir de cette source. Les micropuces des touches supérieures peuvent être alimentées de la même manière que celle illustrée à la figure 3 à l'aide de redresseurs supplémentaires et d'enroulements séparés sur le transformateur. Mais dans ce schéma, une méthode de nutrition différente, dite «rapide» est utilisée, dont la signification est la suivante. Le microcircuit DA1 reçoit de l'énergie du condensateur électrolytique C1, dont la charge se produit à travers le circuit: + 12V, VD1, C1, un transistor ouvert VT2 (à travers les électrodes, le drain est la source), «commun».
En d'autres termes, la charge sur le condensateur C1 se produit lorsque le transistor à clé inférieure est ouvert. En ce moment, la borne négative du condensateur C1 est presque court-circuitée au fil commun (la résistance du drain ouvert - section source des transistors à effet de champ puissants est de millièmes d'Ohm!), Ce qui permet de le charger.
Le transistor VT2 étant fermé, la diode VD1 se fermera également, la charge du condensateur C1 s'arrêtera jusqu'à la prochaine ouverture du transistor VT2.Mais la charge du condensateur C1 est suffisante pour alimenter la puce DA1 alors que le transistor VT2 est fermé. Naturellement, à ce moment, le transistor de la touche supérieure est à l'état fermé. Ce schéma de touches d'alimentation s'est avéré si bon qu'il est appliqué sans modifications dans d'autres conceptions amateurs.
Cet article ne traite que des schémas les plus simples d'onduleurs triphasés amateurs sur microcircuits de petit et moyen degré d'intégration, à partir desquels tout a commencé, et où vous pouvez même tout considérer de l'intérieur en utilisant le schéma. Des conceptions plus modernes sont faites utilisant des microcontrôleurs, le plus souvent des séries PIC, dont les plans ont également été publiés à plusieurs reprises dans les magazines Radio.
Les unités de contrôle à microcontrôleur selon le schéma sont plus simples que sur les microcircuits de degré d'intégration moyen, elles ont des fonctions nécessaires telles que démarrage moteur en douceur, protection contre les surcharges et les courts-circuits et quelques autres. Dans ces blocs, tout est mis en œuvre au détriment des programmes de contrôle ou comme ils sont appelés «firmware». L'unité de commande d'un onduleur triphasé dépendra précisément de ces programmes.
Des circuits assez simples pour les contrôleurs d'onduleurs triphasés sont publiés dans la revue Radio 2008 n ° 12. L'article s'appelle "L'oscillateur maître pour un onduleur triphasé". L'auteur de l'article est également l'auteur d'une série d'articles sur les microcontrôleurs et de nombreux autres modèles. L'article présente deux circuits simples sur les microcontrôleurs PIC12F629 et PIC16F628.
La fréquence de rotation dans les deux schémas est modifiée par étapes à l'aide d'interrupteurs unipolaires, ce qui est assez suffisant dans de nombreux cas pratiques. Il y a aussi un lien où vous pouvez télécharger un "firmware" prêt à l'emploi, et, en outre, un programme spécial avec lequel vous pouvez modifier les paramètres du "firmware" à votre discrétion. Il est également possible de faire fonctionner les générateurs en mode "démo". Dans ce mode, la fréquence du générateur est réduite de 32 fois, ce qui permet d'utiliser visuellement les LED pour observer le fonctionnement des générateurs. Il fournit également des recommandations pour le raccordement de l'unité d'alimentation.
Mais, si vous ne souhaitez pas vous lancer dans la programmation de microcontrôleurs, Motorola a publié un contrôleur intelligent spécialisé MC3PHAC, conçu pour les systèmes de contrôle de moteur triphasé. Sur sa base, il est possible de créer des systèmes peu coûteux d'un entraînement triphasé réglable contenant toutes les fonctions nécessaires pour le contrôle et la protection. De tels microcontrôleurs sont de plus en plus utilisés dans divers appareils électroménagers, par exemple dans les lave-vaisselle ou les réfrigérateurs.
Complet avec le contrôleur MC3PHAC, il est possible d'utiliser des modules d'alimentation standard, par exemple IRAMS10UP60A développé par International Rectifier. Les modules contiennent six interrupteurs d'alimentation et un circuit de commande. Pour plus de détails sur ces éléments, consultez la documentation de leur fiche technique, qui est facile à trouver sur Internet.
Boris Aladyshkin
Voir aussi sur e.imadeself.com
: