ประเภท: บทความเด่น » อิเล็กทรอนิคส์ในทางปฏิบัติ
จำนวนการดู: 79276
ความเห็นเกี่ยวกับบทความ: 4
ชิปลอจิก ตอนที่ 10 วิธีกำจัดการสะท้อนกลับของผู้ติดต่อ
 การใช้ทริกเกอร์เป็นสวิตช์
การใช้ทริกเกอร์เป็นสวิตช์
ในส่วนก่อนหน้าของบทความทริกเกอร์เช่น D และ JK ได้รับการอธิบาย มันจะเหมาะสมที่นี่เพื่อเรียกคืนว่าทริกเกอร์เหล่านี้สามารถทำงานในโหมดการนับ ซึ่งหมายความว่าเมื่อชีพจรถัดไปมาถึงอินพุตนาฬิกา (สำหรับทริกเกอร์ทั้งสองนี้คืออินพุต C) สถานะของทริกเกอร์จะเปลี่ยนเป็นตรงกันข้าม
ตรรกะการดำเนินการนี้คล้ายกับปุ่มไฟฟ้าทั่วไปเช่นเดียวกับในโคมไฟตั้งโต๊ะ: กด - เปิด, กดอีกครั้ง - ปิด ในอุปกรณ์ที่มีวงจรดิจิตอลบทบาทของปุ่มดังกล่าวมักจะถูกเรียกใช้โดยการกระตุ้นการทำงานในโหมดการนับ พัลส์ระดับสูงจะจ่ายให้กับอินพุตนับและสัญญาณเอาท์พุททริกเกอร์จะใช้ในการควบคุมวงจรผู้บริหาร
ดูเหมือนง่ายมาก หากคุณเพียงแค่เชื่อมต่อปุ่มกับอินพุต C ที่เชื่อมต่ออินพุตนี้กับสายทั่วไปเมื่อกดจากนั้นแต่ละครั้งที่กดไกสถานะจะเปลี่ยนไปตามที่คาดไว้ เพื่อให้แน่ใจว่าไม่เป็นเช่นนั้นมันก็เพียงพอที่จะประกอบวงจรนี้และกดปุ่ม: ไกจะไม่ถูกติดตั้งในตำแหน่งที่ถูกต้องทุกครั้ง แต่บ่อยครั้งมากขึ้นหลังจากกดปุ่มหลายครั้ง
สภาพของทริกเกอร์นั้นมีการตรวจสอบที่ดีที่สุดโดยใช้ไฟ LED ซึ่งมีการอธิบายซ้ำ ๆ ในส่วนก่อนหน้าของบทความหรือใช้โวลต์มิเตอร์ ทำไมสิ่งนี้เกิดขึ้นทำไมทริกเกอร์ทำงานไม่เสถียรเหตุผลคืออะไร
ติดต่อเด้งคืออะไร
ปรากฎว่าการตีกลับของผู้ติดต่อคือการตำหนิสำหรับทุกสิ่ง นี่อะไรน่ะ? ผู้ติดต่อใด ๆ แม้แต่ที่ดีที่สุดแม้แต่ สวิทช์กกปรากฎว่าพวกเขาไม่ได้ปิดทันที การเชื่อมต่อที่เชื่อถือได้ของพวกเขาถูกขัดขวางโดยชุดการชนซึ่งมีระยะเวลาประมาณ 1 มิลลิวินาทีหรือมากกว่านั้น นั่นคือถ้าเรากดปุ่มค้างไว้ประมาณครึ่งวินาทีนี่ไม่ได้หมายความว่ามีเพียงหนึ่งพัลส์ในช่วงเวลาดังกล่าวเท่านั้น การปรากฏตัวของมันถูกนำหน้าด้วยหลายสิบหรืออาจเป็นแรงกระตุ้นหลายร้อย
เมื่อมาถึงอินพุตการนับของทริกเกอร์แต่ละพัลส์ดังกล่าวจะเปลี่ยนเป็นสถานะใหม่ซึ่งสอดคล้องกับตรรกะของทริกเกอร์ในโหมดการนับอย่างเต็มที่: พัลส์ทั้งหมดจะถูกนับและผลลัพธ์จะตรงกับจำนวนของพวกเขา และภารกิจคือกดปุ่มหนึ่งครั้งเพื่อเปลี่ยนสถานะการทริกเกอร์เพียงครั้งเดียว
ปัญหาที่คล้ายกันจะเห็นได้ชัดเจนยิ่งขึ้นเมื่อหน้าสัมผัสทางกลเป็นเซ็นเซอร์ความเร็วตัวอย่างเช่นในอุปกรณ์สำหรับหม้อแปลงขดลวดหรือในเครื่องวัดอัตราการไหลของของเหลว: การดำเนินการสัมผัสแต่ละครั้งจะเพิ่มสถานะของมิเตอร์อิเล็กทรอนิกส์ไม่ใช่หนึ่งอย่างที่คาดไว้ เรื่องราวเกี่ยวกับเคาน์เตอร์จะมีขึ้นในภายหลัง แต่สำหรับตอนนี้เพียงแค่เชื่อว่านี่เป็นอย่างนั้นและไม่ใช่อย่างอื่น
วิธีกำจัดการสะท้อนกลับของผู้ติดต่อ
ทางออกปรากฏในรูปที่ 1
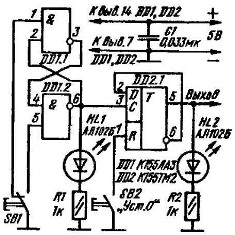
รูปที่ 1 Pulse อดีตบน RS - trigger
วิธีที่ง่ายที่สุดในการกำจัดการตีกลับของผู้ติดต่อคือด้วยทริกเกอร์ RS - ที่คุ้นเคยซึ่งประกอบอยู่ในชิปลอจิก K155LA3 ซึ่งมีความแม่นยำมากขึ้นในองค์ประกอบของ DD1.1 และ DD1.2 เราตกลงกันว่าทางออกโดยตรง RS - ทริกเกอร์ นี่คือขา 3 ตามลำดับเอาต์พุตผกผันคือขา 6
เมื่อตัวเหนี่ยวนำ RS ถูกประกอบขึ้นจากองค์ประกอบของวงจรลอจิกจำเป็นต้องทำข้อตกลงดังกล่าว หากทริกเกอร์เป็นชิปสำเร็จรูปเช่น K155TV1 ตำแหน่งของเอาต์พุตโดยตรงและอินเวอร์สจะถูกระบุโดยข้อมูลอ้างอิง แต่ถึงแม้ในกรณีนี้หากไม่ได้ใช้อินพุตอินพุตของ JK และ C และ microcircuit นั้นถูกใช้เป็นทริกเกอร์ RS ข้อตกลงข้างต้นอาจจะค่อนข้างเหมาะสม ตัวอย่างเช่นเพื่อความสะดวกในการติดตั้งชิปบนบอร์ดแน่นอนในเวลาเดียวกัน RS - input ก็เปลี่ยนสถานที่ด้วย
ในตำแหน่งสวิตช์ที่แสดงในแผนภาพบนเอาต์พุตโดยตรงของทริกเกอร์ RS ระดับเป็นหน่วยโลจิคัลและในทางกลับกันแน่นอนเป็นศูนย์โลจิคัล สถานะของทริกเกอร์การนับ DD2.1 ยังคงเหมือนเดิมเมื่อเปิดเครื่อง
หากจำเป็นสามารถรีเซ็ตได้โดยใช้ปุ่ม SB2 ในการรีเซ็ตทริกเกอร์เมื่อเปิดเครื่องตัวเก็บประจุขนาดเล็กจะเชื่อมต่อระหว่าง R - input และสายสามัญภายใน 0.05 ... 0.1 μFและตัวต้านทานที่มีความต้านทาน 1 ... 10 KOhm ระหว่าง power plus และ R - input จนกระทั่งตัวเก็บประจุถูกชาร์จที่ R - อินพุตแรงดันไฟฟ้าศูนย์ตรรกะจะปรากฏขึ้นชั่วครู่ ชีพจรศูนย์สั้นนี้เพียงพอที่จะรีเซ็ตทริกเกอร์ หากตามเงื่อนไขการทำงานของอุปกรณ์จำเป็นต้องตั้งค่าทริกเกอร์เมื่อเปิดเครื่องเป็นสถานะเดียวดังนั้นวงจร RC นั้นจะเชื่อมต่อกับอินพุต S เราจะพิจารณาย่อหน้าเกี่ยวกับ RC-chain ว่าเป็นการพูดนอกเรื่องโคลงสั้น ๆ และตอนนี้เรายังคงต่อสู้กับการตีกลับของผู้ติดต่อ
การกดปุ่ม SB1 จะเป็นการปิดพินการสัมผัสทางขวาของสายไฟทั่วไป ในเวลาเดียวกันที่เทอร์มินัล 5 ของชิป DD1.2 จะมีพัลส์เด้งทั้งชุดปรากฏขึ้น แต่ประสิทธิภาพของไมโครชิปในซีรีย์ที่ช้าที่สุดนั้นสูงกว่าความเร็วของหน้าสัมผัสเชิงกลมาก ดังนั้นพัลส์แรกของ RS - ทริกเกอร์จะรีเซ็ตเป็นศูนย์ซึ่งสอดคล้องกับระดับสูงที่เอาต์พุตอินเวอร์ส
ในขณะนี้แรงดันไฟฟ้าตกบวกจะเกิดขึ้นที่ C - อินพุตสลับทริกเกอร์ DD2.1 ไปเป็นสถานะตรงกันข้ามซึ่งสามารถสังเกตได้โดยใช้ LED HL2 พัลส์การตีกลับครั้งถัดไปจะไม่ส่งผลกระทบต่อสถานะของทริกเกอร์ RS ดังนั้นสถานะของทริกเกอร์ DD2.1 จะไม่เปลี่ยนแปลง
เมื่อคุณปล่อยปุ่ม SB1 ทริกเกอร์ขององค์ประกอบ DD1.1 DD1.2 จะกลับไปเป็นสถานะเดียว ในขณะนี้แรงดันลบจะเกิดขึ้นที่เอาต์พุตกลับหัว (ขา 6 DD1.2) ซึ่งไม่เปลี่ยนสถานะของทริกเกอร์ DD2.1 เพื่อกลับสู่ทริกเกอร์การนับสู่สถานะดั้งเดิมปุ่ม SB1 จะต้องกดอีกครั้ง ด้วยความสำเร็จเดียวกันในอุปกรณ์ที่คล้ายกันจะทำงานและ JK - ทริกเกอร์.
รูปจำลองดังกล่าวเป็นวงจรทั่วไปและทำงานอย่างชัดเจนและไม่ล้มเหลว ข้อเสียเปรียบเพียงอย่างเดียวคือการใช้ปุ่มติดต่อพลิก ด้านล่างจะแสดง shapers ที่คล้ายกันทำงานจากปุ่มที่มีรายชื่อเดียว
มาตรการในการกำจัดสัญญาณเตือนที่ผิดพลาดป้องกันการรบกวน
ในแผนภาพคุณจะเห็นชิ้นส่วนใหม่ - ตัวเก็บประจุ C1 ที่ติดตั้งในวงจรเพาเวอร์ทริกเกอร์ จุดประสงค์ของเขาคืออะไร? ภารกิจหลักคือการป้องกันการรบกวนซึ่งไม่เพียง แต่ก่อให้เกิดความไว แต่ยังรวมถึงจุลภาคอื่น ๆ ทั้งหมด
หากคุณสัมผัสองค์ประกอบการติดตั้งด้วยวัตถุที่เป็นโลหะพวกเขาจะสร้างเสียงแรงกระตุ้นที่สามารถเปลี่ยนสถานะของทริกเกอร์ตามที่คุณต้องการ สัญญาณรบกวนในวงจรเดียวกันนั้นถูกสร้างขึ้นเมื่อมีการใช้งานทริกเกอร์แม้แต่ครั้งเดียว สัญญาณรบกวนนี้ถูกส่งผ่านพลังงานบัสจากชิปหนึ่งไปยังอีกชิปหนึ่งและยังสามารถทำให้เกิดการสลับทริกเกอร์ที่ผิดพลาดได้
เพื่อป้องกันไม่ให้สิ่งนี้เกิดขึ้นกับพลังงานบัสและติดตั้งตัวเก็บประจุบล็อก ในทางปฏิบัติตัวเก็บประจุดังกล่าวที่มีความจุ 0.033 ... 0.068 ยูเอฟติดตั้งในอัตราของตัวเก็บประจุหนึ่งตัวสำหรับทุกสองหรือสามวงจร ตัวเก็บประจุเหล่านี้จะติดตั้งใกล้กับขั้วอำนาจของไมโคร
แหล่งที่มาของการทริกเกอร์ไมโครชิพเท็จอื่นอาจเป็นหมุดอินพุตที่ไม่ได้ใช้ พัลส์รบกวนสัญญาณรบกวนจะเกิดขึ้นกับข้อสรุปดังกล่าวเป็นหลัก เพื่อต่อสู้กับการเตือนที่ผิดพลาดขั้วอินพุตที่ไม่ได้ใช้ควรเชื่อมต่อผ่านตัวต้านทานที่มีความต้านทาน 1 ... 10 KOhm ไปยังบัสบวกของแหล่งพลังงาน นอกจากนี้หากโครงการยังไม่ได้ใช้ องค์ประกอบตรรกะและไม่จากนั้นอินพุตของพวกเขาควรเชื่อมต่อกับสายทั่วไปซึ่งเป็นเหตุผลว่าทำไมหน่วยโลจิคัลจะปรากฏที่เอาต์พุตขององค์ประกอบดังกล่าวและเชื่อมต่ออินพุตทริกเกอร์ที่ไม่ได้ใช้กับพวกเขา
หากใช้สวิตช์หรือปุ่มสลับเป็นแหล่งสัญญาณสำหรับไมโครเซอร์กิตสถานการณ์เมื่อผู้ติดต่อถูกเปิดและลวดที่มีความยาวเพียงพอยังคง“ ลอยอยู่ในอากาศ” ไม่สามารถยอมรับได้อย่างสมบูรณ์ เสาอากาศดังกล่าวจะได้รับสัญญาณรบกวนเรียบร้อยแล้ว ดังนั้นตัวนำดังกล่าวควรเชื่อมต่อกับบัสกำลังบวกผ่านตัวต้านทานที่มีความต้านทาน 1 ... 10 KOhm
การยับยั้งการพูดคุยแบบปุ่มกับผู้ติดต่อหนึ่งคู่
การใช้ปุ่มที่มีผู้ติดต่อหนึ่งคู่นั้นง่ายกว่ามากดังนั้นจึงมีการใช้บ่อยกว่าปุ่มที่มีแถบสัมผัส หลายวงจรที่ออกแบบมาเพื่อระงับการพูดคุยของปุ่มดังกล่าวแสดงในรูปที่ 2
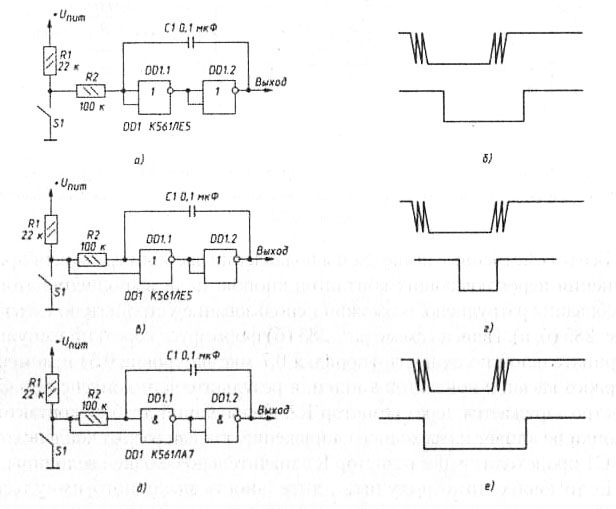
รูปที่ 2
การทำงานของวงจรเหล่านี้จะขึ้นอยู่กับความล่าช้าเวลาที่สร้างขึ้นโดยใช้โซ่ RC รูปที่ 2a แสดงวงจรที่มีความล่าช้าในการเปิดและปิดการทำงานรูปที่ 2c ประกอบด้วยวงจรที่มีความล่าช้าเท่านั้นและรูปที่ 2d แสดงวงจรที่มีการปิดเครื่องล่าช้า วงจรเหล่านี้เป็นระบบสั่นเดี่ยวซึ่งได้ถูกเขียนไว้แล้วในส่วนหนึ่งของบทความนี้ รูปที่ 2b, 2d, 2e แสดงแผนภาพเวลาของพวกเขา
เป็นเรื่องง่ายที่จะเห็นว่า formers เหล่านี้สร้างขึ้นมาจากชิปของซีรี่ส์ K561 ซึ่งหมายถึงชิป CMOS ดังนั้นค่าของตัวต้านทานและตัวเก็บประจุจะถูกระบุโดยเฉพาะสำหรับชิปดังกล่าว shapers เหล่านี้ควรใช้ในวงจรที่สร้างขึ้นบน microcircuits ของ K561, K564, K176 series และอื่น ๆ
บอริส Aladyshkin
ดูได้ที่ e.imadeself.com
: