Categorias: Eletricistas iniciantes, Controladores programáveis
Número de visualizações: 8010
Comentários sobre o artigo: 4
Um exemplo de atualização do circuito elétrico de um elevador de carga usando um controlador programável (PLC)
Recentemente, o tópico de automação de vários processos tecnológicos usando controladores programáveis (CLPs) tornou-se cada vez mais popular. Apesar disso, existem muito poucos artigos práticos na Internet com exemplos reais de como programar esses CLPs. Este tópico é muito interessante, porque é na junção de equipamentos elétricos, eletrônicos e programação. Aprender a escrever programas PLC é possível sem sequer tê-los. O modo de emulação, disponível em todos os pacotes de software modernos, ajuda muito nisso.
Neste artigo, mostrarei um exemplo de conversão de um circuito elétrico construído em dispositivos de relé (iniciantes, relés) em um programa que funcionará no controlador. Devo dizer imediatamente que este é apenas um pequeno projeto educacional e não pretende explicar nada mais do que apenas explicar os princípios básicos da programação de CLP com um exemplo concreto.
Relé de frete
O esquema inicial para este projeto é um esquema relativamente simples de um elevador de carga (elevador de carga) com controle de alavanca em dois andares. O diagrama é mostrado na figura abaixo.

Talha elétrica municipal com um motor em duas paradas
Existe apenas um motor no circuito, que aumenta e diminui o elevador entre dois andares. Este é um motor assíncrono trifásico reversível com um rotor de fase de 380 V. Os resistores de partida e os contatos de três acionadores de partida eletromagnéticos são conectados ao rotor do motor, permitindo que o motor seja iniciado em três etapas. Esta solução permite no processo de partida do motor reduzir sua corrente de partida e aumentar o torque de partida.
A partida do motor é automatizada usando três relés de aceleração (1RU - 3RU). Estes são temporizadores convencionais de 24 volts DC. Por sua potência, existe um transformador de abaixamento e retificador.
Um freio eletromagnético de bloco trifásico é conectado aos terminais do motor, que, quando a tensão é aplicada ao motor, freia seu eixo e, quando a tensão desaparece, o eixo do motor é instantaneamente preso e fixado em uma posição fixa.
Reversão do motor usando contatos de duas entradas eletromagnéticas (no diagrama B e H). A energia do circuito é fornecida através de um disjuntor (no circuito - WU) e um disjuntor (1A).
A inclusão no trabalho do elevador só é possível na presença de tensão. É controlado por um relé de tensão (PH), localizado no lado esquerdo do circuito. Também existem soquetes e uma campainha que pode ser ligada a partir de qualquer local para chamar o condutor.
As portas do eixo e da cabine abrem e fecham manualmente. O elevador é controlado usando a alavanca em três posições - "Up", "Down" e "Zero".
Quando a alavanca é movida para uma das posições extremas, o elevador começa a se mover e, quando o piso desejado é atingido, a alavanca é movida mecanicamente para a posição "Zero". Ao mesmo tempo, os contatos no circuito do interruptor são interrompidos, a bobina de partida é desenergizada, o motor é desconectado da rede, os contatos no circuito do rotor são abertos e o elevador para. Depois disso, você pode iniciar o movimento do elevador na direção oposta.

O elevador de carga pertence a dispositivos de alto risco e em seu circuito (como nos circuitos de qualquer elevador), há um grande número de intertravamentos diferentes contatos da chave limitadora e contatos de vários dispositivos de proteção.
Nesse esquema, são interruptores de trip (fim) que controlam o fechamento das portas da cabine, eixos nos pisos inferior e superior, elevação e abaixamento da cabine acima das zonas superior e inferior de trabalho, contatos da "folga das cordas de elevação" que se abrem quando o cabo é enfraquecido ou solto cabine do elevador, contatos do limitador de velocidade, coletor e tensor do cabo. No total - 14 sensores discretos.
Quando qualquer um dos contatos listados é aberto, o motor do elevador deve desligar e frear instantaneamente, portanto, todos os sensores, o contato do relé de tensão e o botão "Parada geral" são conectados em série ao circuito da bobina dos atuadores eletromagnéticos que controlam o motor.
Criando um programa PLC para um elevador de carga
A tarefa era que, sem alterar nada no dispositivo, em princípio, a operação e os controles do elevador, transferisse seu circuito de uma exibição de relé desatualizada para uma opção usando um controlador programável.
A vantagem do formulário do programa para controlar a instalação é que, no futuro, se desejado, o programa poderá ser facilmente modificado, melhorar a conveniência de controlar o elevador, alterar a lógica de sua operação e melhorar sua funcionalidade. Mas essas ações devem ser acompanhadas por uma alteração no design do elevador e pela adição de outros dispositivos adicionais ao circuito. Em nossa versão, essa tarefa não foi feita.
Nesse caso, foi proposta uma opção para modernizar o equipamento elétrico de um elevador de carga, alterando seu esquema de controle com uma abordagem que, por exemplo, absolutamente nada mudaria para uma pessoa que opera esse mecanismo.
Portanto, salvaremos o dispositivo de controle principal do elevador - a chave da alavanca e deixaremos o motor assíncrono com o rotor de fase com sua partida em três estágios, embora ainda desejemos substituí-lo por um motor assíncrono por um rotor de gaiola, que é ligado através do soft starter. Mas, por enquanto, não faremos isso, pois essa solução simplificará bastante o circuito elétrico do elevador, o que não é muito complicado.
Portanto, dividiremos nosso esquema em quatro zonas (veja o esquema do elevador na figura).
")
Não tocaremos em nada na zona 1, porque ela é responsável pela chamada sonora do elevador e controla a presença de tensão no circuito. A zona 2 com o motor, freio eletromagnético e contatos de potência dos motores de partida também não muda. Todos os dispositivos da zona 4 podem ser excluídos porque a ordem de inclusão dos contatos no circuito do rotor do motor quando ele inicia é controlada por temporizadores de software. Permanece na zona 3. A principal modernização afetará essa zona específica.

Como controlador, tomamos a empresa de PLC Aries. O programa para ele será no idioma Cfc. Na minha opinião, este é o idioma mais conveniente para iniciantes. Ele é muito parecido na linguagem dos blocos funcionais Fbdmas com seus próprios pequenos recursos. Muitos amam outra ótima linguagem - linguagem da escada LD. Não tenho nada contra, mas Cfc É mais conveniente compilar um programa para CLP, então usei essa linguagem, mas aqui tudo é para todos. Para compilar o programa, usamos o pacote CoDeSys 2.3.

Um programa é um conjunto de blocos funcionais (E, OU, NÃO, gatilhos e temporizadores). O programa de trabalho do elevador de carga Cfc:

Inicialmente precisaremos de blocos E (elemento E). Na saída do elemento está uma unidade lógica (no programa -"VERDADEIRO") somente quando unidades lógicas também estiverem em todas as entradas. Se o estado de apenas uma entrada diferir da unidade, a saída será redefinida para zero (no programa - "Falso").
Este elemento nos ajudará a organizar todos os contatos de intertravamento e contatos de segurança (entradas discretas) e, como você se lembra, existem 14 deles (no programa, eles são indicados com o nome SQ1 - SQ14). Na entrada do bloco E também conectamos o contato do relé de tensão e o botão "Parada geral" (SB1). Para facilitar a percepção, fiz todos os contatos em 3 elementos Ee, em seguida, usou outro para combiná-los em uma cadeia.
Por padrão, ao adicionar ao programa, qualquer unidade funcional possui 2 entradas. Se precisar adicionar uma entrada adicional, aponte o bloco com o mouse, pressione o botão direito e selecione "Entrada de bloco". Assim, você pode adicionar qualquer número necessário de entradas adicionais ao bloco.

O interruptor da alavanca está conectado a duas entradas do controlador (no programa - "SA_verh" e "SA_niz"). Um interruptor em cada uma de suas duas posições extremas fornece uma unidade lógica para um dos dois RS gatilhos ("RS_verh" ou "RS_niz"). Um gatilho é um análogo de uma bobina de partida com um contato de bloqueio em um circuito de controle de relé.
Para habilitá-lo, envie a unidade lógica ao contato "SET"desativar - ativado"RESET". Saída de gatilho "Q1"transmite um sinal para uma das saídas do controlador -"KM1" ou "KM2"aos quais estão conectados bobinas solenóides. Os iniciantes trocam de contato e controlam o motor.

O início das três etapas do programa é organizado usando 2 temporizadores "TON". Ao aplicar uma unidade lógica à entrada do timer "IN"ele conta o tempo dado na entrada"PT"e muda a saída de atraso de tempo"Q"do zero lógico para um. Depois que o primeiro timer (T1) é acionado por um sinal de sua saída (Q), o tempo começa a contar com o segundo timer (T2) e após um tempo especificado na entrada PT, o segundo timer também envia uma unidade lógica para sua saída (Q) .
Para controlar saídas (no programa - KM3, KM4 e KM5) 3 bobinas do acionador de partida eletromagnético estão conectadas. O primeiro deles liga imediatamente quando você liga o KM1 ou KM2 e conecta a resistência máxima ao rotor do motor, KM4 e KM5 ligar por temporizador e alternar curto-circuito parte da resistência de partida. Após a partida do motor, os três motores de partida permanecem na posição ligada.

Item OU (OR lógico) necessário para iniciar simultaneamente uma das duas entradas principais, a parte do circuito responsável pela partida do motor em três estágios foi incluída no trabalho. Se houver uma unidade lógica em uma das entradas do elemento "OU", uma unidade lógica é transmitida para sua saída, ou seja, para sua operação, um sinal em qualquer uma de suas entradas é suficiente.

Entre temporizadores e saídas do controlador E com uma das entradas inversas (círculo de entrada). Para esse elemento, uma unidade lógica na saída aparece apenas quando um sinal de unidade lógica é aplicado a uma entrada normal e um zero lógico é aplicado a uma inversa.

O mesmo elemento, apenas com duas entradas inversas, está localizado próximo às entradas "SA_verh" e "SA_niz", recebendo sinais do interruptor da alavanca. Isso é necessário para garantir que todos os dispositivos de partida nas saídas sejam desligados quando o interruptor retornar à posição zero, quando os circuitos Up e Down estiverem abertos.
Se houver dois zeros lógicos na entrada desse elemento E fornece uma unidade lógica na saída do elemento. Este sinal vem através do programa para a entrada de gatilhos "RESET", os gatilhos são redefinidos para zero e os iniciadores nas saídas são desativados. Elementos E com uma entrada inversa entre temporizadores e saídas KM3 e KM4 desconecte essas saídas e, consequentemente, desconecte os acionadores de partida responsáveis por evitar as resistências no circuito do rotor quando o motor estiver parado.

Para definir uma entrada ou saída inversa, é necessário mover o mouse para o bloco funcional, selecionar a entrada ou saída desejada, pressionar o botão direito do mouse e selecionar "Inverter". Da mesma forma, qualquer entrada ou saída inversa pode ser convertida para normal.
Itens E Os números 5 e 10 não permitem que os acionadores de partida responsáveis por acionar os motores "Para cima" e "Para baixo" sejam ligados ao mesmo tempo (proteção contra curto-circuito nos contatos de potência dos motores de partida enquanto os liga). Embora neste esquema com um interruptor de alavanca, isso não seja possível.Porém, como os contatos de bloqueio desse tipo estavam presentes no circuito de relé original, foi decidido mantê-los no programa do PLC.
E, finalmente, resta fornecer o desligamento instantâneo do motor elétrico ao abrir qualquer um dos contatos na entrada. A presença de gatilhos no circuito não permitiu que isso fosse feito inicialmente. Para que o circuito funcione corretamente em qualquer emergência (acionamento dos contatos de segurança, contatos dos interruptores, contato do relé de tensão ou botão "Parada geral"), foi adicionado um circuito duas cadeias de elementos NÃO e OU (4 e 7).
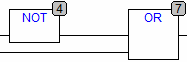
O elemento NOT precede a unidade lógica na entrada para o zero lógico na saída e vice-versa - o zero na entrada para a unidade na saída. Você pode explicar como as cadeias de NOT e OR funcionam no programa? Escreva nos comentários.
Emulação de programa CFC no CoDeSys
Após criar o programa, você pode fazer o check-in CoDeSys no modo de emulação. Para fazer isso, selecione "Modo de emulação" na guia "Online", clique no botão "Conectar" e defina a unidade lógica para todas as entradas - "VERDADEIRO", escreva esses valores no programa clicando em"Ctrl" + F7 e clique F5 para começar.
Modo de emulação emCoDeSys:

Simulação de comutação de entrada ("VERDADEIRO"e"Falso") você pode observar a mudança de circuitos em azul (caminho do sinal) e a mudança no estado das saídas. Após cada alteração no estado de entrada, não esqueça de escrever esses valores no programa pressionandoCtrl" + F7. Para desativar o modo de emulação, clique em "Parar", depois em "Desconectar" na guia "Online" e desmarque a opção "Modo de emulação".
Conclusão
Mais uma vez, quero observar que este projeto estava exclusivamente relacionado a objetivos educacionais e ainda não foi testado em um controlador programável real. Se você tiver alguma dúvida e alguma das opções acima não estiver clara, pergunte nos comentários, tentarei respondê-las. E também é muito importante para mim obter uma resposta para a pergunta - devo continuar escrevendo artigos sobre esse tópico? Em geral, estou pronto para ouvir quaisquer comentários e sugestões construtivas.
Veja também em e.imadeself.com
: