Catégories: Circuits microcontrôleurs
Nombre de fois vus: 13565
Commentaires sur l'article: 0
Comprend la connexion d'appareils à Arduino
Plateforme pour les amateurs de robotique et d'automatisation Arduino célèbre pour sa conception modulaire et sa facilité d'utilisation. Parfois, je tombe sur une publicité où ils disent que vous pouvez assembler votre robot sans être pratiquement familier avec l'électronique. Mais ce n'est pas tout à fait vrai.
Si certains actionneurs et mécanismes ne sont pas connectés correctement, vous pouvez graver des ports Arduinka (comme je l'ai déjà mentionné dans l'article sur comment ne pas brûler Arduino) Et si vous ne savez pas comment gérer les appareils numériques - au mieux, vous ne pourrez tout simplement pas établir de connexion.

J'ai acheté plusieurs modules pour Arduino, que faire ensuite?
Pour en savoir plus sur les caractéristiques de la connexion, les tensions d'alimentation, les niveaux logiques, etc., vous devez vous familiariser avec la fiche technique de votre module.
La fiche technique ou la fiche technique est la documentation technique du produit. Cette documentation peut être téléchargée sur n'importe quelle puce ou capteur. Ils se trouvent généralement sur le site Web du fabricant. De plus, il existe des ressources spéciales sur le réseau, sur lesquelles toute une masse de documentation technique est collectée
Lisez attentivement les informations de la fiche technique, mais que dois-je rechercher? Tout d'abord, une puce, en plus de la partie principale du nom, a généralement une partie ou un préfixe variable - le plus souvent, il s'agit d'une ou plusieurs lettres.
Cela indique certaines caractéristiques d'un microcircuit particulier, par exemple, la puissance maximale, les tensions d'alimentation et les niveaux logiques (si l'appareil est numérique), éventuellement le cas dans lequel il est exécuté, etc.
Si vous n'avez pas trouvé d'informations nutritionnelles et un journal dans la fiche technique. niveaux, contactez les communautés arduino russophones; sur leurs forums, les caractéristiques de tous les modules communs sont généralement prises en compte.
ArduinoUno a une tension d'alimentation et des niveaux logiques de 5 V, si l'appareil externe fonctionne dans une plage de 3,3 V, vous devrez les former, vous pouvez organiser l'alimentation en utilisant un stabilisateur LDO (linéaire avec une faible chute, pour le stabiliser, il a besoin d'au moins 1,3 volts de «surtension au maximum» courant, contre 2 volts sur les stabilisateurs de la série 78xx, ce qui vous permet d'obtenir 3,3 volts à partir de 4,5 volts (piles à trois doigts).

La documentation technique des capteurs et appareils numériques indique également les noms des protocoles par lesquels ils "communiquent" entre eux. Ceux-ci peuvent être des protocoles individuels et standard, les mêmes:
-
UART
-
I2C;
-
SPI
Arduino travaille avec eux. Cela vous permettra de trouver plus facilement des bibliothèques prêtes à l'emploi et des exemples de code.
Conditionnement et amplification du signal
Les débutants se posent assez souvent des questions sur l'adaptation des dispositifs et des actionneurs à l'arduino. Nous considérerons les plus courants:
1. Circuits de tension adaptés.
2. La coordination de la puissance de la broche de sortie et de l'actionneur, c'est-à-dire l'amplification de la tension et / ou du courant.
Correspondance de niveau
Que dois-je faire si les niveaux logiques de mon module sont de 3,3 volts et de l'arduino 5 volts? Il est assez simple d'utiliser un convertisseur de niveau logique. Il peut être assemblé à partir d'éléments discrets, ou vous pouvez acheter un module prêt à l'emploi sur la carte, par exemple ceci:

Un tel convertisseur est bidirectionnel, c'est-à-dire il abaisse le niveau haut et augmente la réponse basse. BT (1, 2, 3, 4) - plates-formes pour connecter des signaux de bas niveau, HT (1, 2, 3, 4) - niveaux élevés, HV et BT sans nombres - ce sont des tensions de 5 et 3,3 Volts, comme avec les sources de signaux convertis GND - fil de terre ou négatif. Dans un cas particulier, il y a 4 canaux indépendants.
Adaptation des circuits avec de grandes différences de tension
Si vous voulez démarrer un signal, par exemple à partir de circuits haute tension, par exemple 220 V, vous devez utiliser un optocoupleur.Cela fournira une isolation galvanique et une protection contre les salves à haute tension des entrées du microcontrôleur. De tels circuits sont utilisés à la fois pour la réception d'un signal et pour les signaux de sortie d'un microcontrôleur vers un réseau, ainsi que pour contrôler les triacs enchaîné.

La probabilité d'apparition d'un potentiel élevé sur la carte Arduino dans ce cas est extrêmement faible, cela est assuré par l'absence de contact électrique, et la communication se fait via un canal optique, c'est-à-dire à l'aide de la lumière. Vous pouvez en savoir plus à ce sujet en étudiant les appareils photo et optoélectroniques.
Si un grand saut se produit, l'optocoupleur brûlera, l'image est PC8171, mais vous ne surchargerez pas les ports du microcontrôleur.
Connecter des consommateurs puissants
Étant donné que le microcontrôleur ne peut contrôler que le fonctionnement des appareils, vous ne pouvez pas connecter un consommateur puissant à son port. Exemples de tels consommateurs:
-
Relais
-
Solénoïdes;
-
Moteurs électriques;
-
Servos.
1. Connexion servo
La tâche principale du servo-variateur est de définir la position du rotor connecté aux actionneurs, de le contrôler et de le modifier en faisant de petits efforts. Autrement dit, vous, à l'aide d'un potentiomètre, si le servo-variateur est conçu pour tourner dans un demi-tour (180 degrés) ou avec l'encodeur, si une rotation circulaire (360 degrés) est nécessaire, vous pouvez contrôler la position de l'arbre servo (moteur électrique dans notre cas) de puissance arbitraire.

De nombreux passionnés de robotique utilisent l'arduino comme base de leurs robots. Ici, les servos ont trouvé une grande utilité. Ils sont utilisés comme entraînement de mécanismes rotatifs pour caméras, capteurs et aiguilles mécaniques. Les modélisateurs radio utilisent pour conduire les roues qui tournent dans les modèles de voitures. L'industrie utilise de grands entraînements dans les machines CNC et autres automatismes.

Dans les petits services amateurs, une carte avec capteur de position et électronique est intégrée au boîtier. Trois fils en sortent généralement:
-
Rouge - plus la puissance, si un lecteur puissant est préférable de se connecter à une source externe, et non à la carte Arduino;
-
Noir ou brun - moins, la connexion ainsi que plus;
-
Jaune ou orange - le signal de commande - il est alimenté par la broche numérique du microcontrôleur (sortie numérique).
Une bibliothèque spéciale est fournie pour la gestion du serveur, son accès est déclaré au début du code avec la commande "#include servo.h".
Connexion moteur
Pour piloter les mécanismes et régler leur vitesse de rotation, il est plus simple d'utiliser le DPT (moteur DC à balais avec excitation par aimants permanents). Vous avez probablement vu de tels moteurs dans des voitures radiocommandées. Ils sont facilement inversés (activés pour tourner dans le bon sens) il suffit de changer la polarité. N'essayez pas de les connecter directement aux broches!
Mieux vaut utiliser un transistor. S'adaptera bipolaire, conductivité au moins directe (pnp), au moins inverse (npn). Le champ fonctionne également, mais lorsque vous en choisissez un spécifique, assurez-vous que son obturateur fonctionne avec des niveaux logiques?
Sinon, il ne s'ouvrira pas complètement, ou vous brûlerez la sortie numérique du microcontrôleur tout en chargeant la capacité de la porte - ils utilisent un pilote, le moyen le plus simple est de pomper le signal à travers un transistor bipolaire. Ci-dessous est le circuit de contrôle à travers transistor à effet de champ.

S'il n'y a pas de résistance entre G et S, alors l'obturateur (G) ne sera pas tiré au sol et pourra spontanément «marcher» à cause des interférences.
Comment déterminer si un transistor à effet de champ convient pour une commande directe à partir d'un microcontrôleur, voir ci-dessous. Dans la fiche technique, recherchez le paramètre Vgs, par exemple, pour IRL540, toutes les mesures et tous les graphiques sont liés à Vgs = 5v, même un paramètre tel que la résistance de canal ouvert est indiqué pour cette tension entre la grille et la source.


En plus de la brosse DPT, le refroidisseur peut être connecté à partir de l'ordinateur de la même manière, bien qu'il existe un moteur sans brosse, dont les enroulements sont contrôlés par le convertisseur intégré, dont la carte est située directement dans son boîtier.
Les régimes de ces deux types de moteurs sont faciles à régler en faisant varier la tension d'alimentation. Cela peut être fait si la base du transistor n'est pas connectée en numérique (sortie numérique), mais avec une broche (~ pwm), dont la valeur est déterminée par la fonction "analogWrite ()".
Relais et solénoïdes
Pour les circuits de commutation où la régulation n'est pas nécessaire et une commutation fréquente est pratique d'utiliser un relais. En choisissant le bon, vous pouvez commuter tous les courants et tensions avec des pertes minimales de conductivité et de chauffage des lignes électriques.
Pour ce faire, appliquez la tension requise à la bobine du relais. Sur le circuit relais, sa bobine est conçue pour contrôler 5 volts, les contacts d'alimentation peuvent commuter à la fois une paire de volts et le réseau 220 V.

Les solénoïdes sont des bobines ou actionneurs électromagnétiques.
Exemples:
-
Le lecteur verrouille les portes de la voiture;
-
Électrovannes;
-
Électroaimant dans la production métallurgique;
-
La centrale électrique du canon gaussien et plus encore.
Dans tous les cas, un circuit typique pour connecter des bobines CC à un microcontrôleur ou à une logique ressemble à ceci:
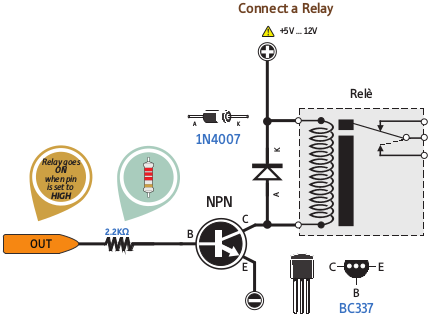
Un transistor pour amplifier le courant de commande, la diode est connectée dans le sens opposé pour protéger la sortie du microcontrôleur des salves d'EMF à auto-induction.

Périphériques d'entrée et capteurs
Vous pouvez contrôler votre système avec des boutons, des résistances, des encodeurs. En utilisant le bouton, vous pouvez envoyer un signal à l'entrée numérique du niveau haut (haut / 5V) ou bas (bas / 0V) arduino.
Pour ce faire, il existe deux options pour l'inclusion. Vous avez besoin d'un bouton normalement ouvert sans fixation; à certaines fins, vous avez besoin d'un interrupteur à bascule ou d'un bouton avec fixation - choisissez vous-même, selon la situation. Pour soumettre une unité, vous devez connecter le premier contact du bouton à la source d'alimentation, et le second au point de connexion de la résistance et à l'entrée du microcontrôleur.

Lorsque le bouton est enfoncé sur la résistance, la tension d'alimentation chute, c'est-à-dire un niveau élevé. Lorsque le bouton n'est pas enfoncé, il n'y a pas de courant dans le circuit, le potentiel sur la résistance est faible, le signal "Low / 0V" est appliqué à l'entrée. Cette condition est appelée "la broche est tirée au sol et la résistance est" tirée vers le bas ".
Si vous voulez que le microcontrôleur obtienne 0 au lieu de 1 lorsque vous cliquez sur le bouton, connectez le bouton normalement fermé de la même manière ou lisez comment le faire avec normalement ouvert.

Pour donner au microcontrôleur une commande avec un signal nul, le circuit change un peu. Une branche de résistance est connectée à la tension d'alimentation, la seconde au point de connexion du bouton normalement ouvert et à l'entrée numérique de l'arduino.
Lorsque le bouton est relâché, toute la tension reste dessus, l'entrée obtient un niveau élevé. Cet état est appelé "la broche est tirée vers le haut" et la résistance est "tirée". Lorsque vous appuyez sur le bouton, vous shuntez (fermez) l'entrée du sol.
Diviseur de tension et entrée de signal par potentiomètre et analogique résistif

Un diviseur de tension est utilisé pour connecter des résistances variables, telles que des thermistances, des photorésistances, etc. En raison du fait que l'une des résistances est constante et la deuxième variable - vous pouvez observer le changement de tension à leur point médian, dans l'image ci-dessus, il est indiqué comme Ur.
Ainsi, il est possible de connecter différents capteurs analogiques de type résistif et des capteurs qui, sous l'influence de forces extérieures, modifient leur conductivité. Ainsi que des potentiomètres.
Dans l'image ci-dessous, vous voyez un exemple de connexion de tels éléments. Le potentiomètre peut être connecté sans résistance supplémentaire, puis en position extrême il y aura pleine tension, mais dans la position minimale, il est nécessaire d'assurer la stabilisation ou la limitation de courant - sinon il le fera court-circuit.

Conclusions
Afin de connecter n'importe quel module et ajout au microcontrôleur sans erreur, vous devez connaître les bases de l'ingénierie électrique, la loi d'Ohm, des informations générales sur l'électromagnétisme, ainsi que les bases du fonctionnement des dispositifs à semi-conducteurs. En fait, vous pouvez vous assurer que c'est beaucoup plus facile à faire que d'écouter ces mots complexes. Utilisez les diagrammes de cet article dans vos projets!
Voir aussi sur e.imadeself.com
: